Stavba spaglFPV Race koptéra
V tomto článku Vám ukážu Jak postavit závodní dron, se kterým momentálně trénuji a jezdím na závody. Obsahem článku je fotonávod - stavba fpv dronu a screenshoty mého nastavení (PIDy, Rates, filtry).

Seznam dílů použitých v tomto fotonávodu:
- Rám TBS Source V
- Motory Xnova LR 2207 1800KV
- Stack iFlight Succex-E mini
- Kamera Foxeer Predator v4 nano
- VTx TBS Unify nano v1.1
- Anténa Foxeer lollipop stubby
- Ipex to SMA konektor
- TBS Crossfire
- TBS Crossfire anténa
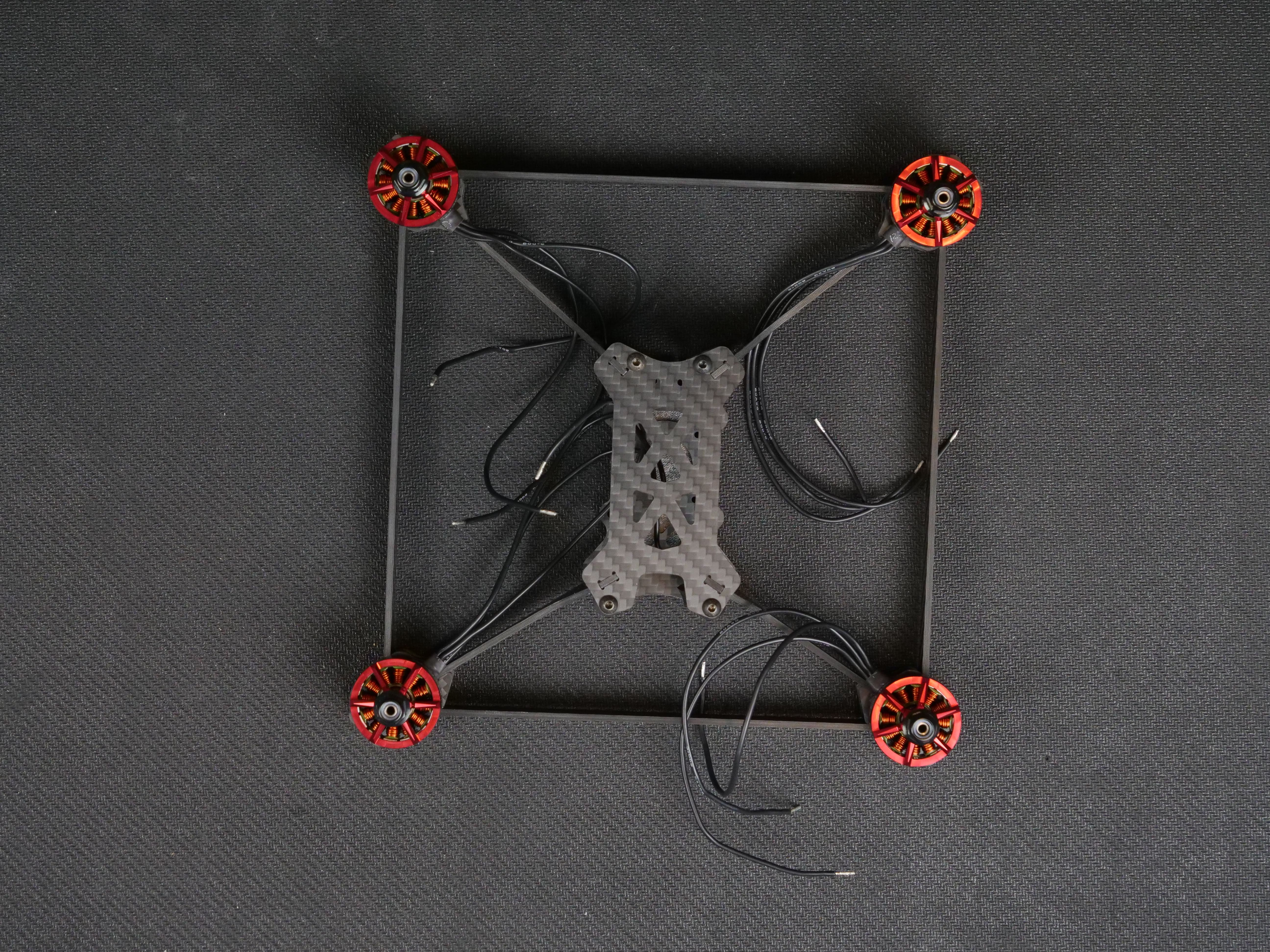
1. Upevnění motorů na rám
Stavba rámu byla popsána v TOMTO článku. Po kompletním sestavení rámu začínáme upevněním všech čtyř motorů na konce ramen. Motory uchytíme čtyřmi dlouhými šrouby skrz obě koncová plata ramen a dotáhneme.




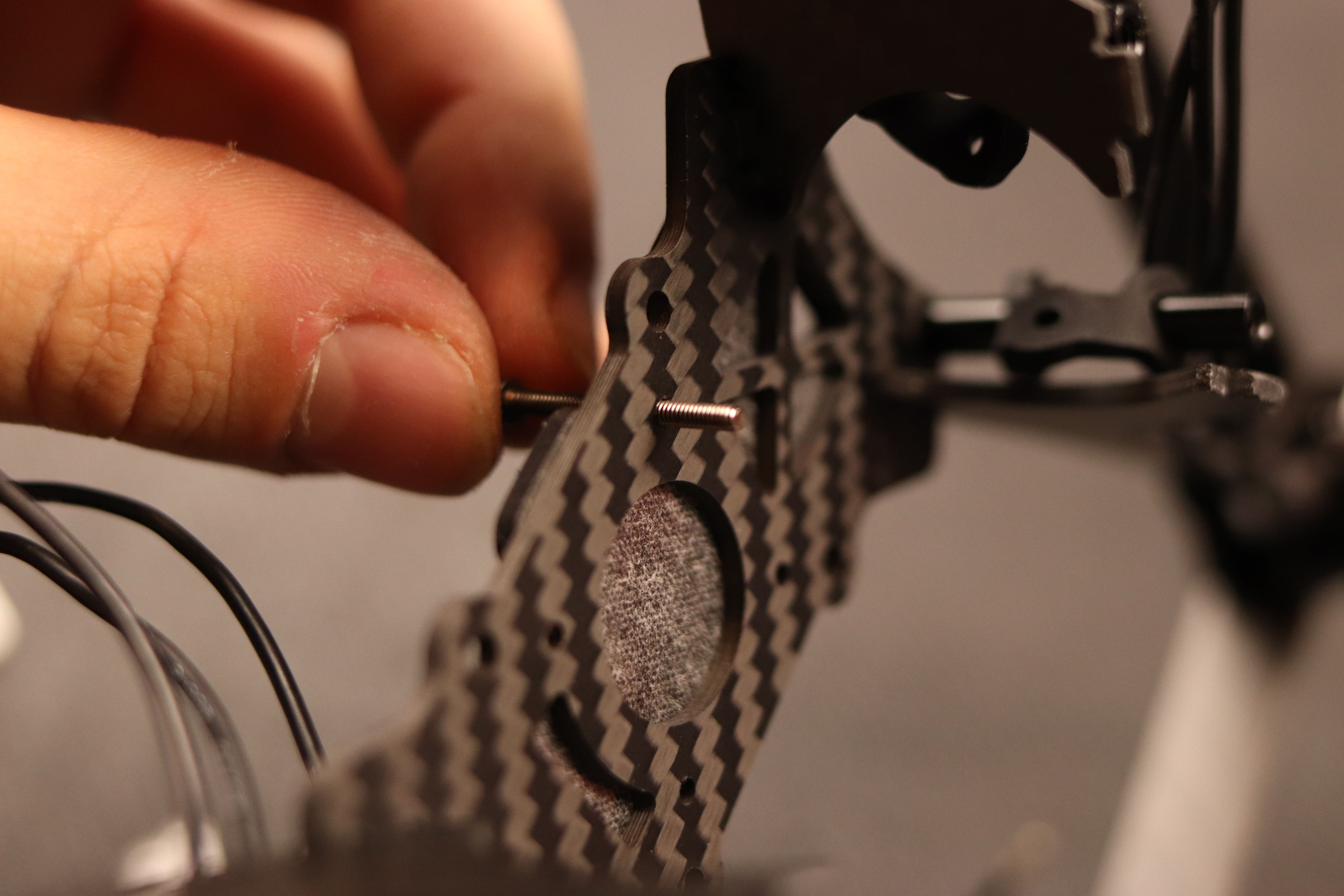
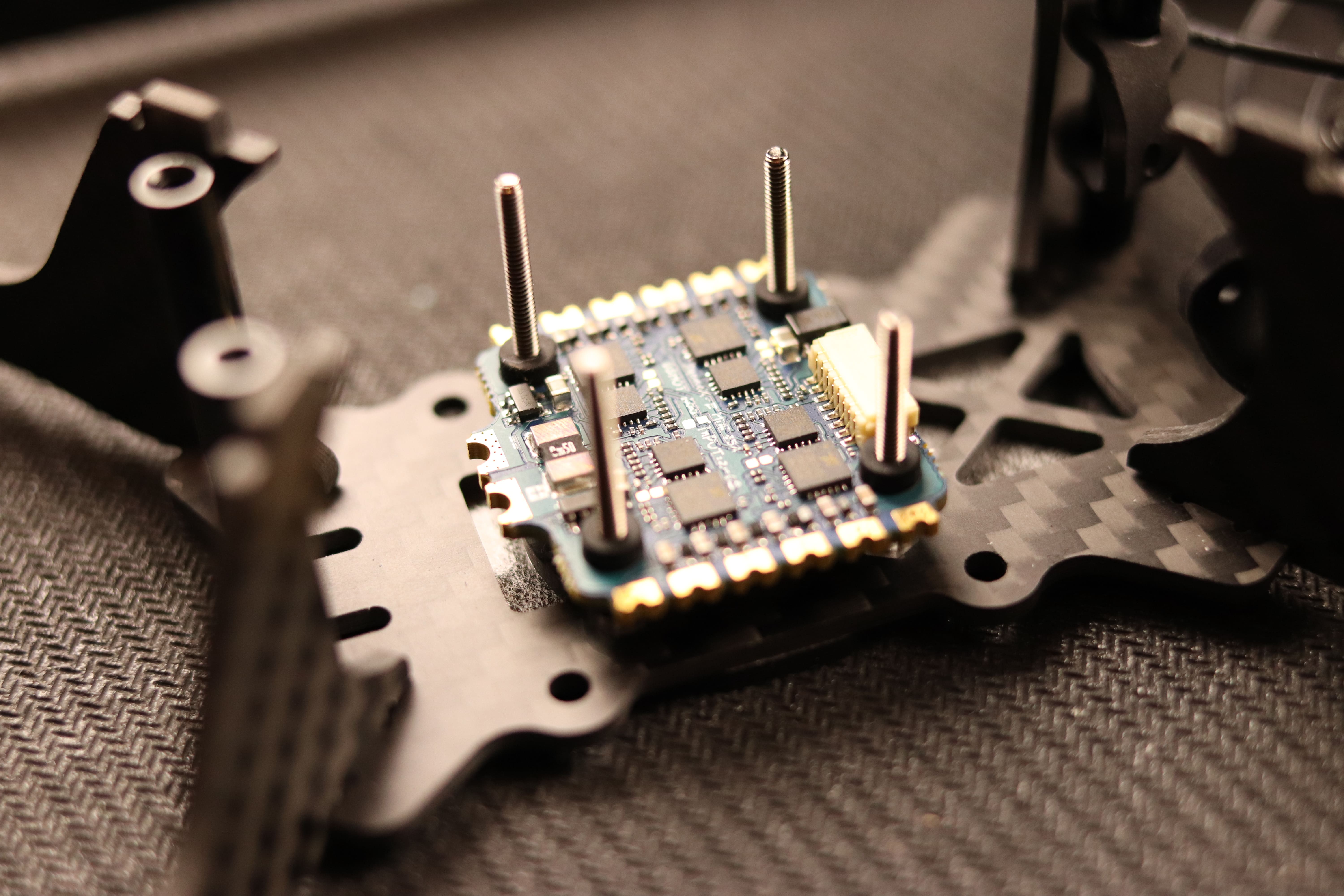
2. Uchycení ESC
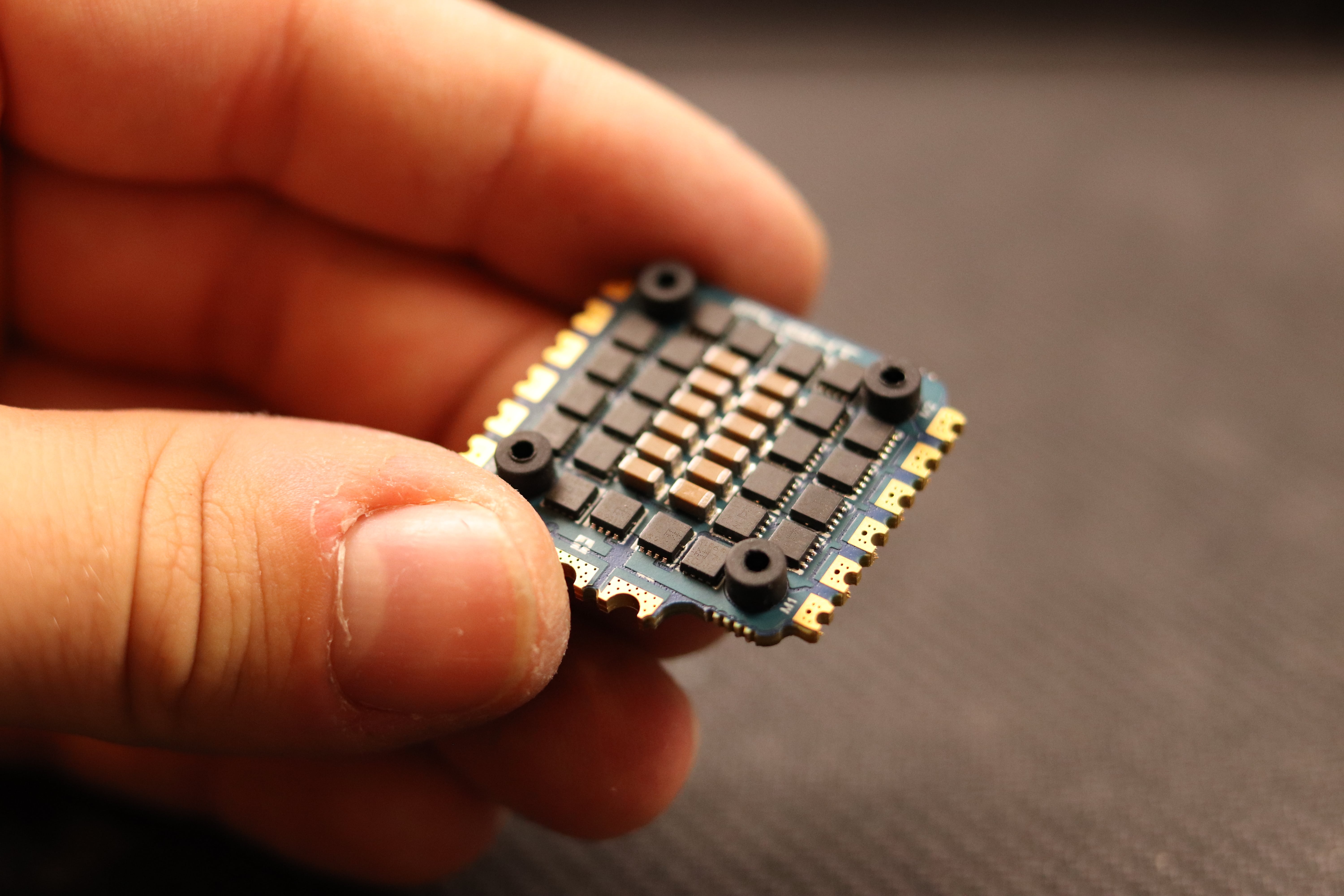
V dalším kroku upevníme ESC (regulátory) ke spodnímu platu pomocí dlouhých šroubů (jsou součástí balení Stacku) a to podle zvolené velikosti (20x20 nebo 30x30). V tomto návodu byl zvolený stack o velikosti 20x20 a to zejména kvůli nižší váze. Nejdříve tedy protáhneme šrouby skrz spodní karbonové plato a ty poté zajistíme plastovými matkami.
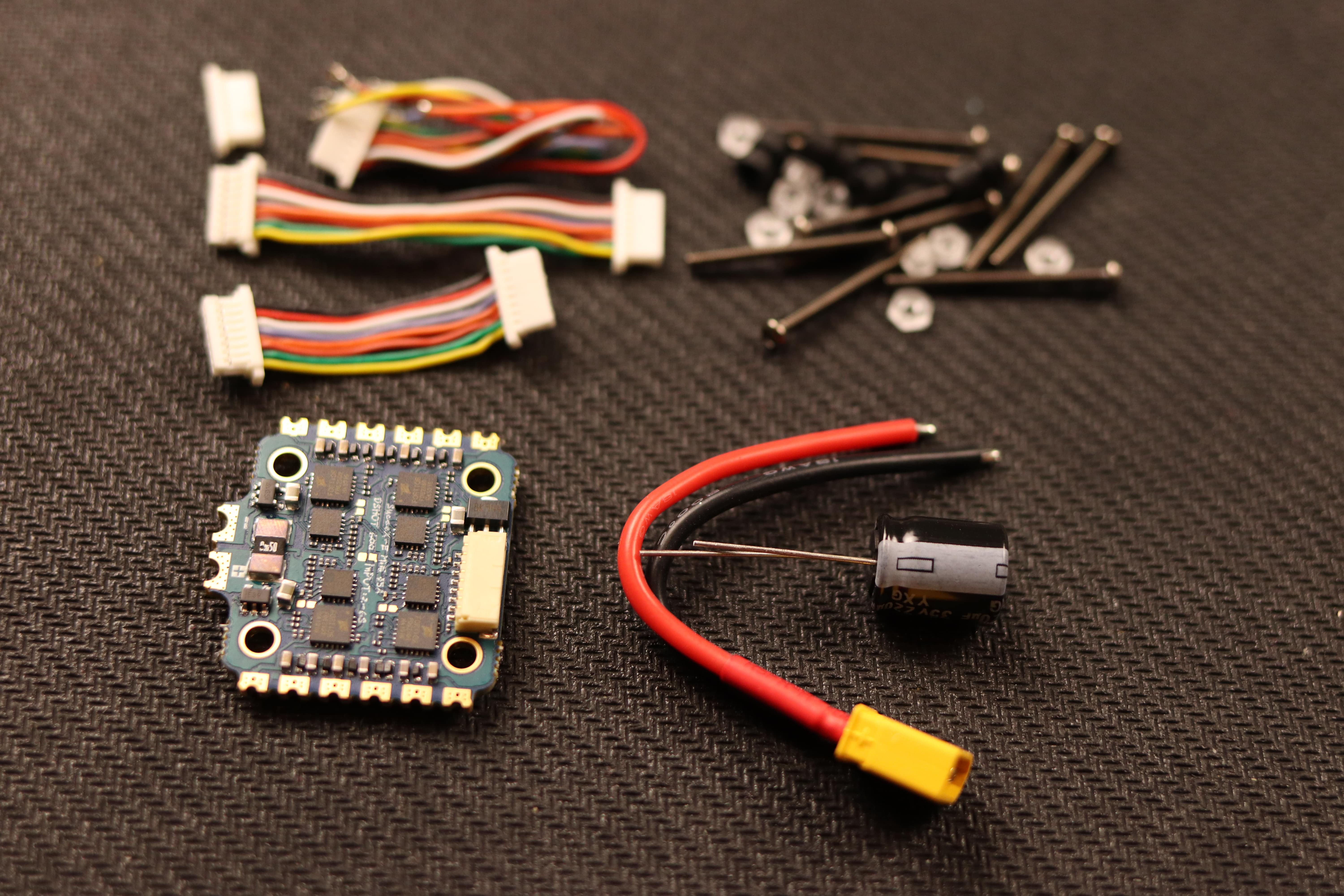
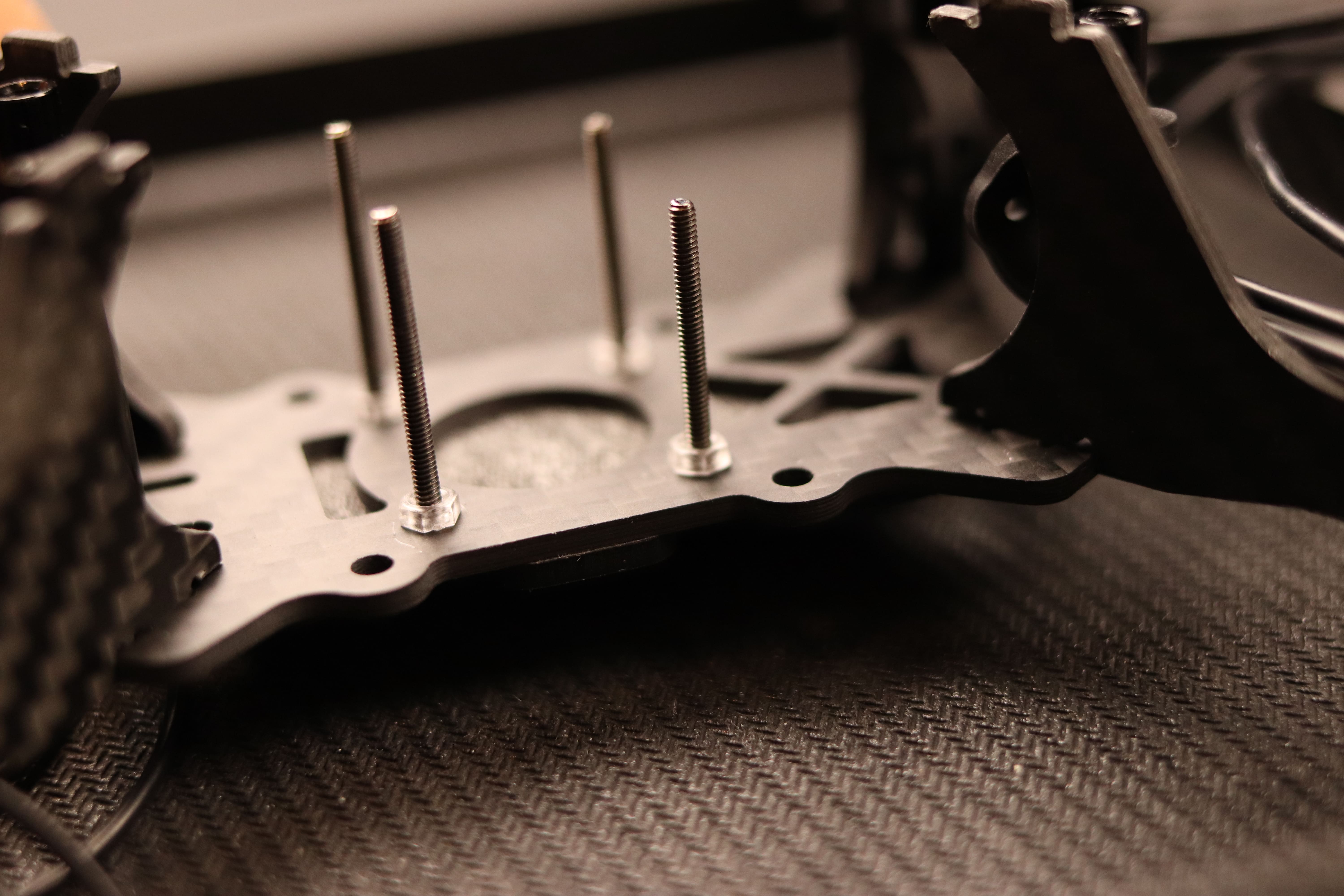
Dále protáhneme skrz díry v ESC přiložené gumové sloupky - jejich účelem je absorbovat vibrace (tzv. softmount).
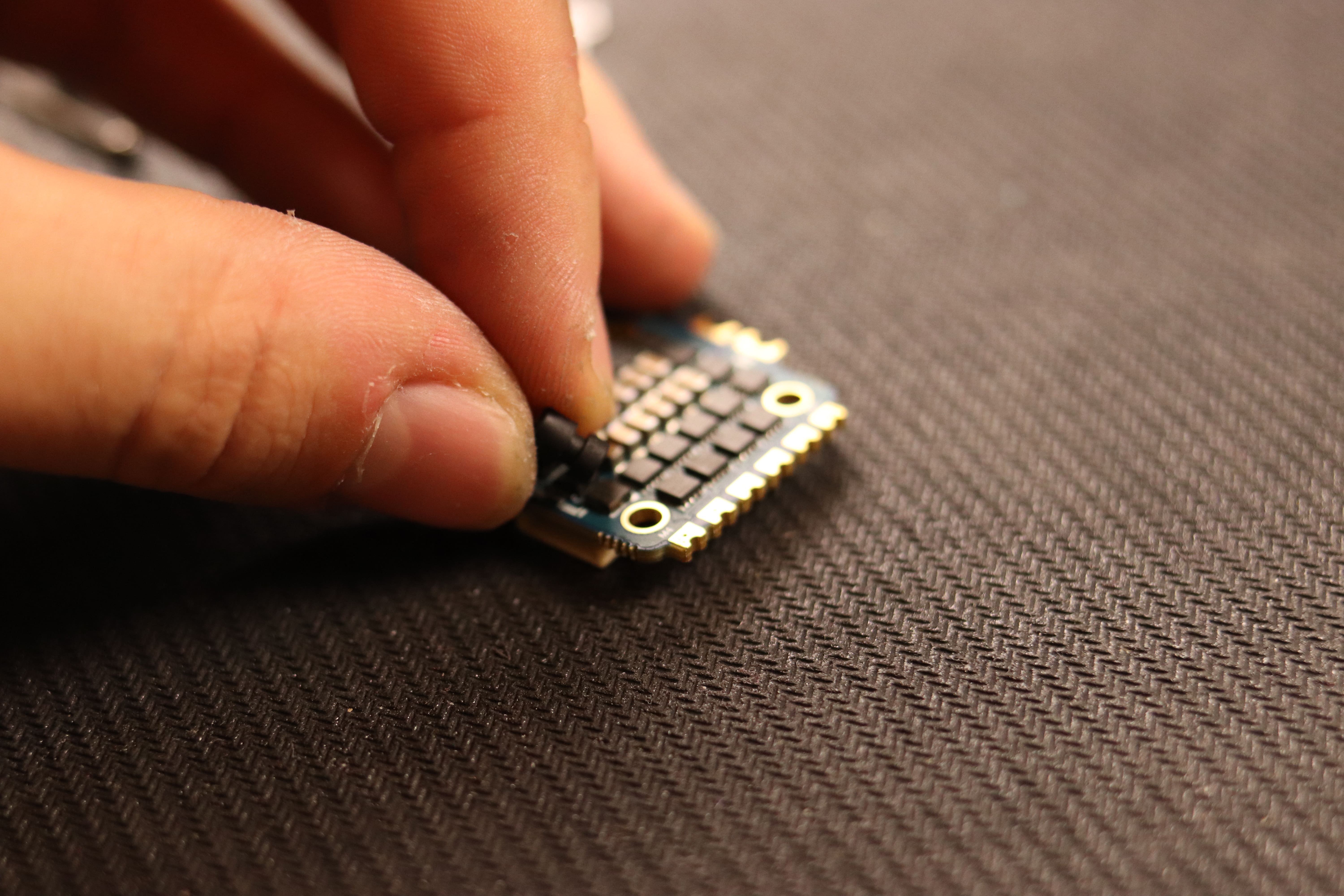
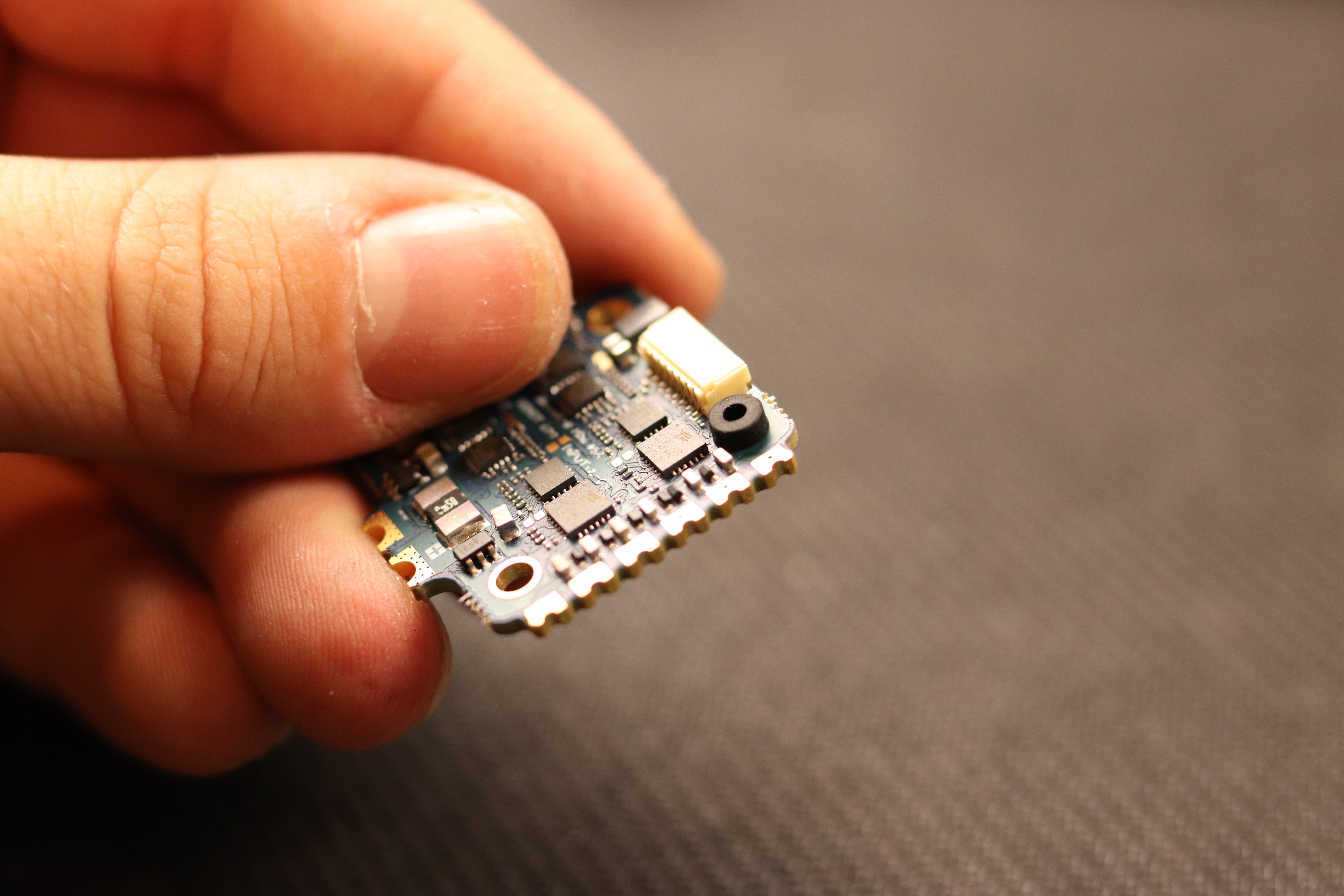
Nyní je ESC připravené k usazení na šrouby. Na ESC je popsáno, které tři pady jsou pro fáze kterého motoru. Z pohledu rámu je pravý zadní označován za 1. motor a tedy ESC umístíme tak, aby popis M1 byl v pravém spodním rohu. Po umístění ESC si od motoru naměříme potřebnou vzdálenost kabelů k padům ESC tak, aby nebyly úplně napnuté, ale zároveň aby nám volně nevlály (v tomto případě radši delší, než kratší neboť delší se dají upevnit, kratší bychom museli nastavovat). Kablíky v potřebné délce zkrátíme.

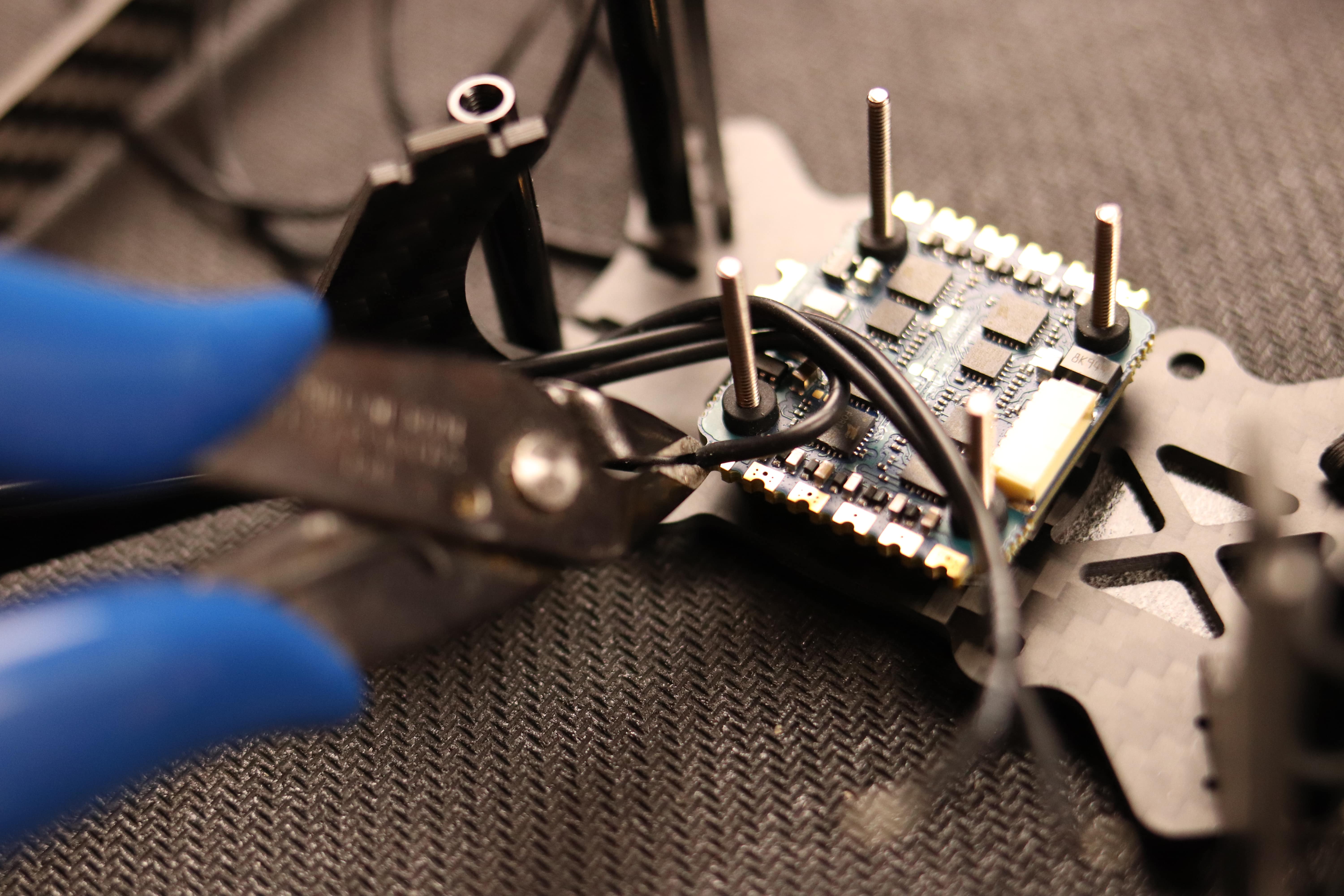
Konce kablíků zbavíme bužírky (stačí 1-2mm) a poté pocínujeme. Dále pocínujeme pady na ESC. Společným prohřátím kablík připájíme na pad ESC. Takto pokračujeme se všemi 12ti fázemi motoru. Pořadí fází nám určuje směr otáčení motoru, ale to v tuto chvíli neřešíme, neboť směr později otočíme pomocí software BLHeli.
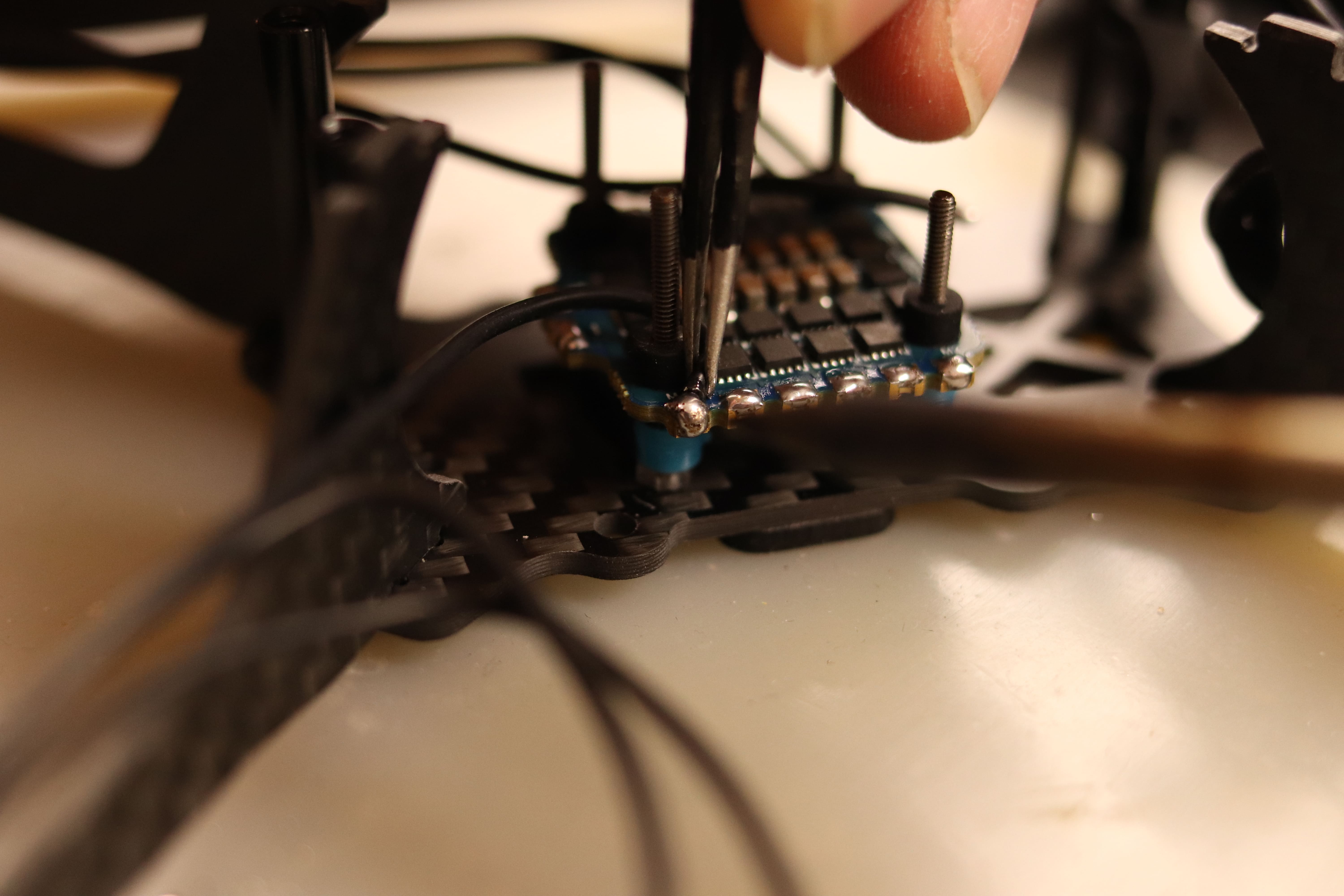
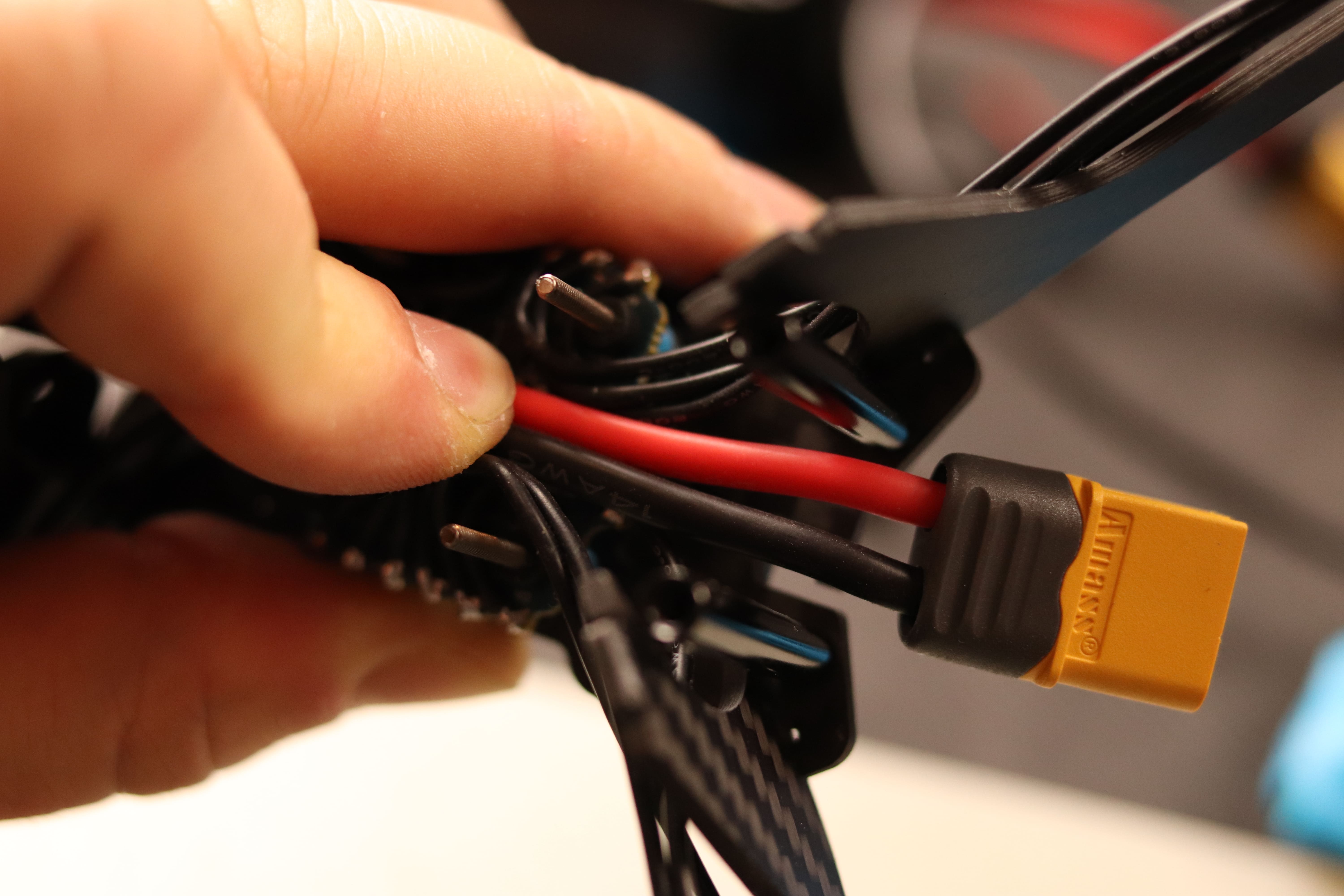
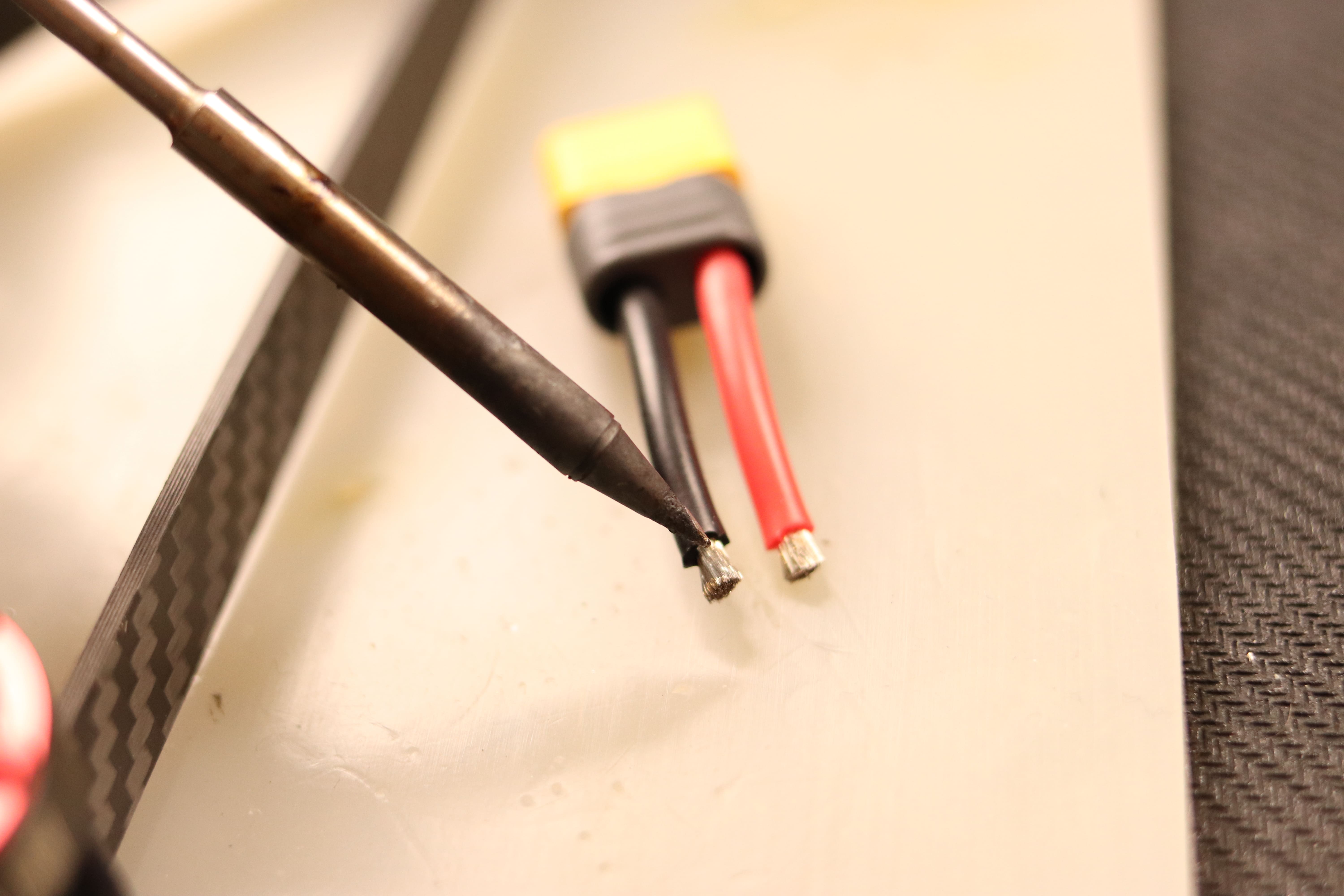
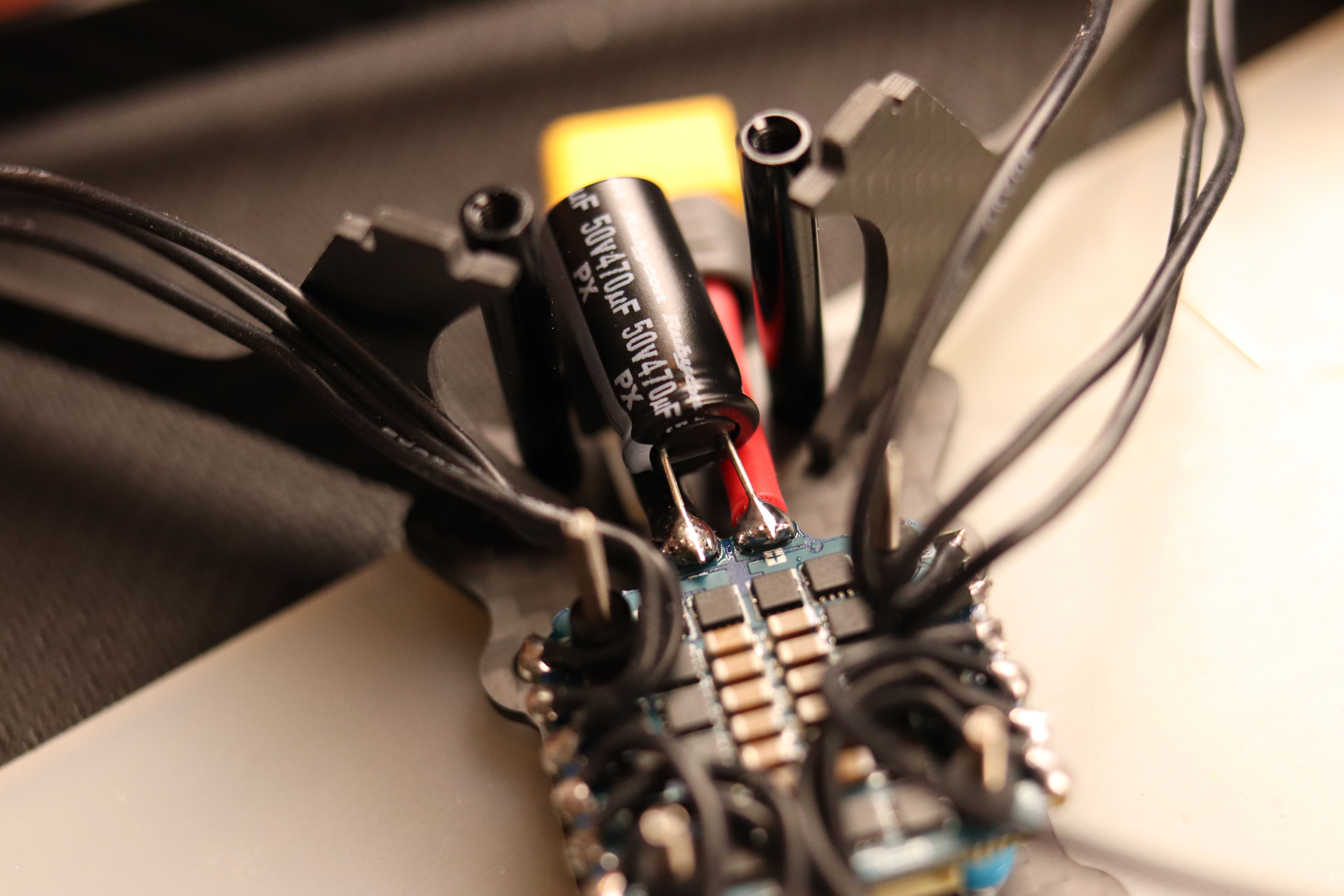
Dalším krokem je napájení XT60 konektoru na ESC. Tento konektor je taktéž součástí balení Stacku. Odměříme si jak dlouhý kabel budeme potřebovat, zkrátíme a opět konce zbavíme bužírky. Odhalené konce pocínujeme. Taktéž pady ESC označené + a - pocínujeme a společným prohřátím opět spojíme.
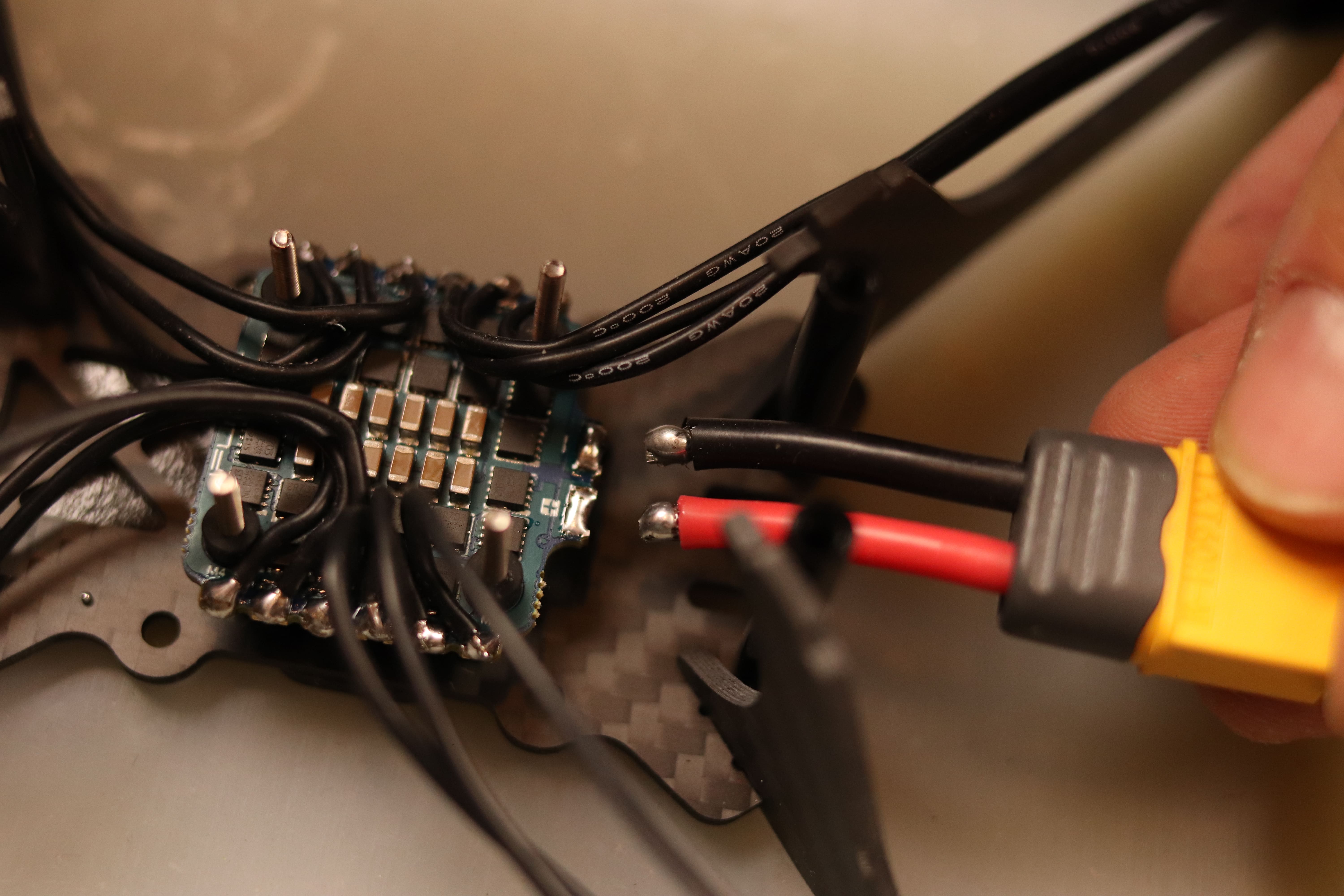
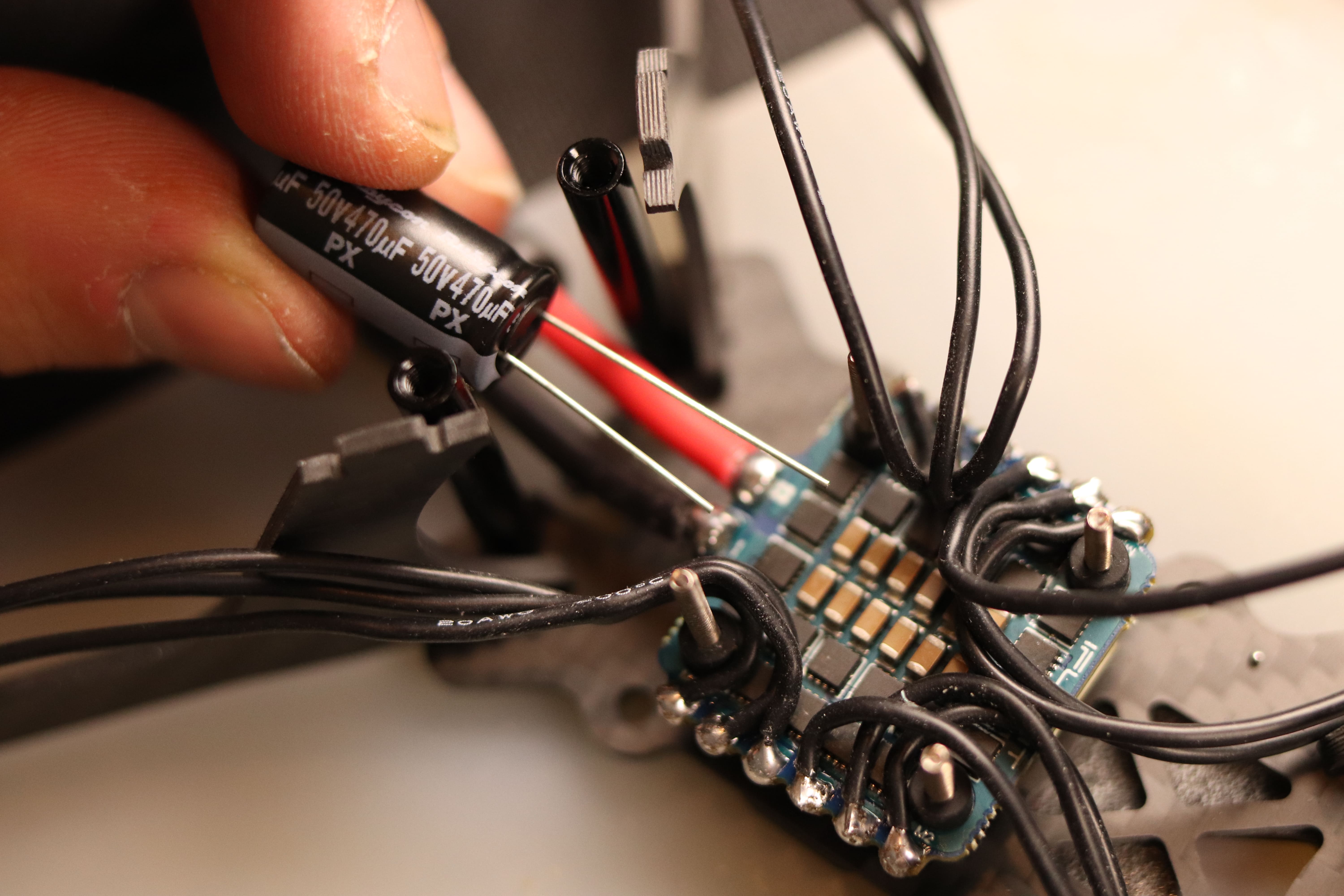
Není to nezbytné, ale doporučuji připájet i přiložený kondenzátor, který zde slouží jako filtr k utlumení špiček napětí. Opět zkrátíme nožky kondenzátoru, pocínujeme a společným prohřátím spojíme na + a -.
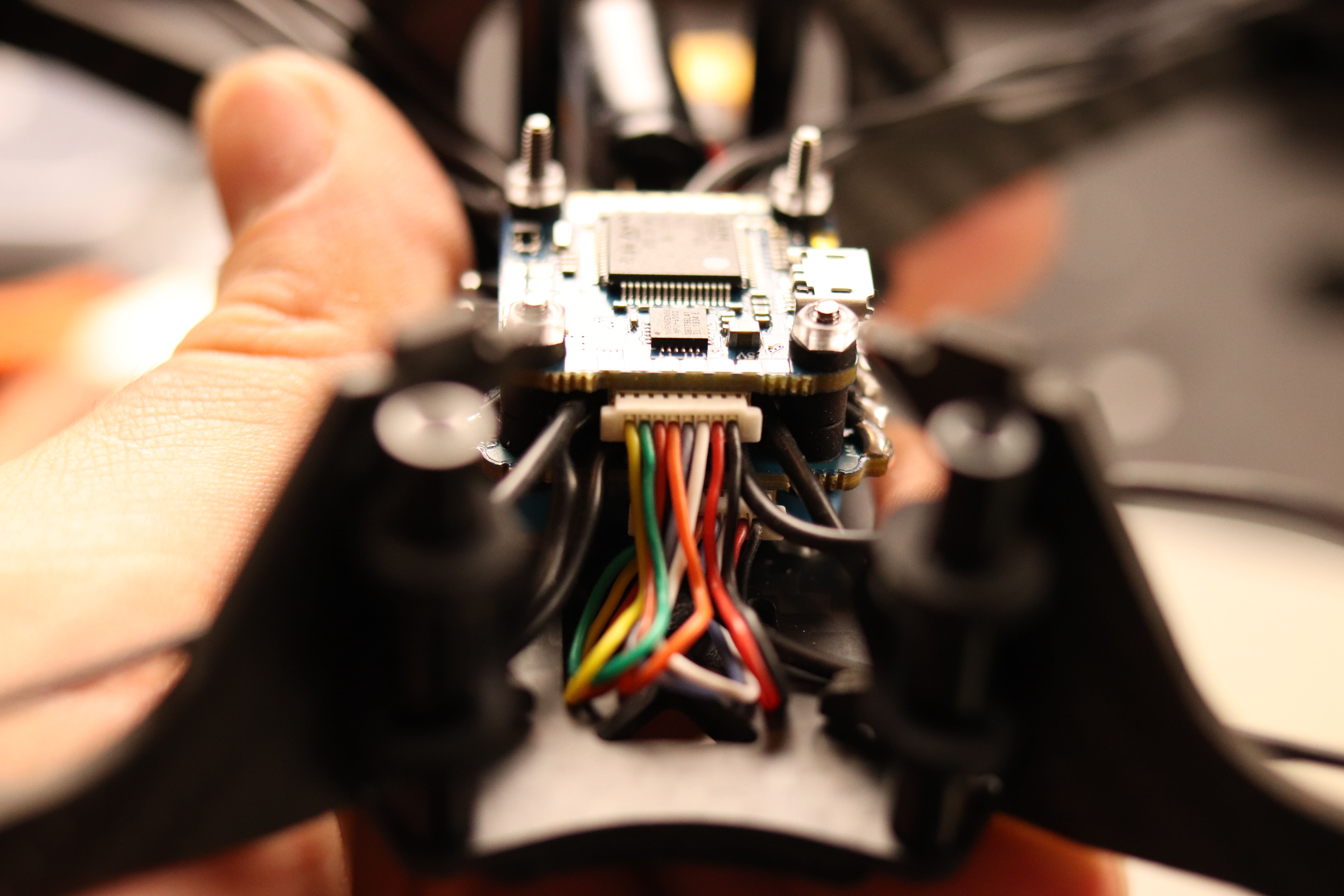
3. Uchycení FC
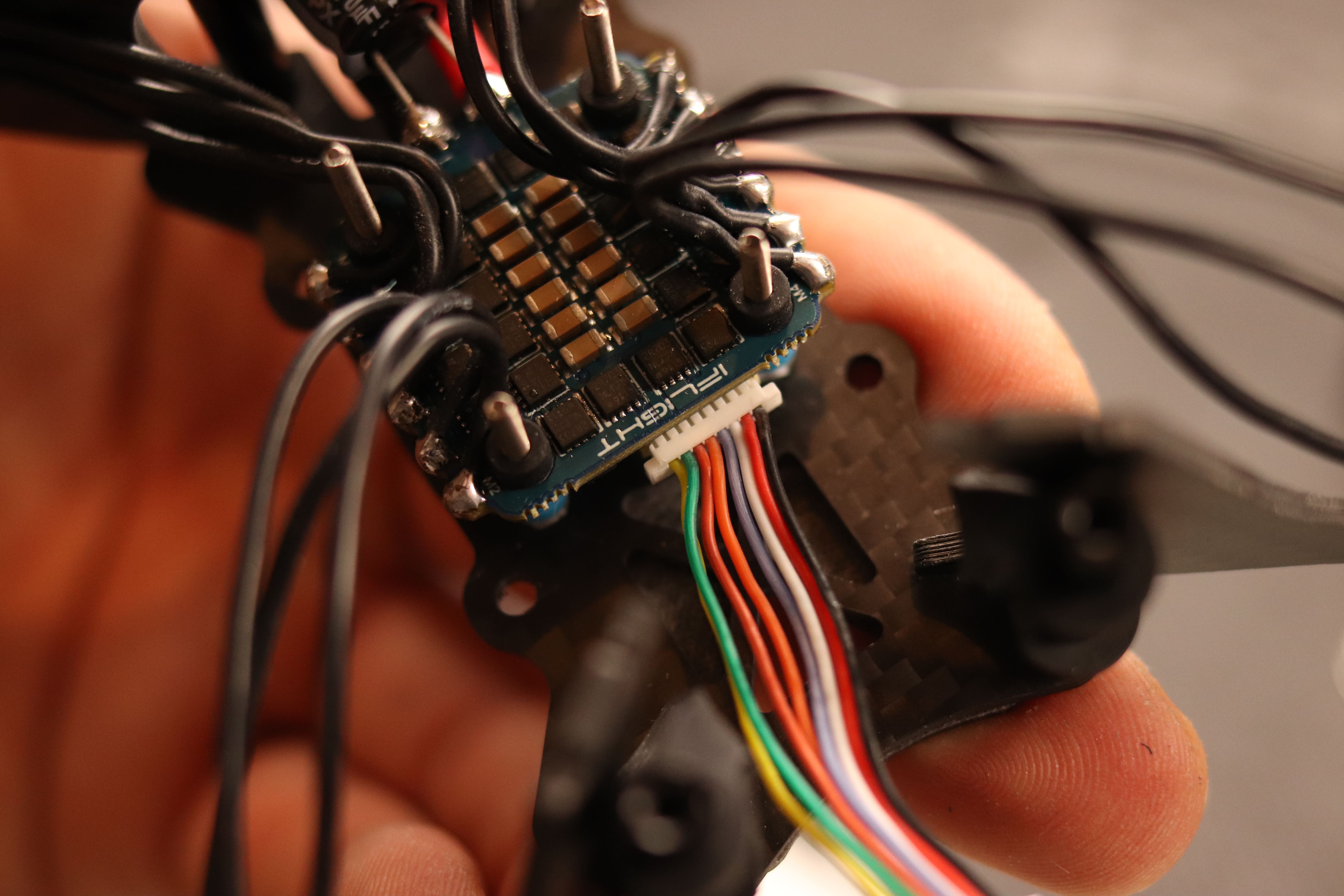
Dalším logickým krokem je uchycení řídící desky (FC). Do ESC zapojíme jeden konec 8pin kabelu. Do dir FC opět vložíme gumové softmounty jako u ESC. FC poté navlékneme na šrouby, vrchní strana je ta s USB, správné natočení poznáme podle textu. Výsledný stack pojistíme matkami a druhou stranu 8pin kabelu zapojíme do slotu v FC.
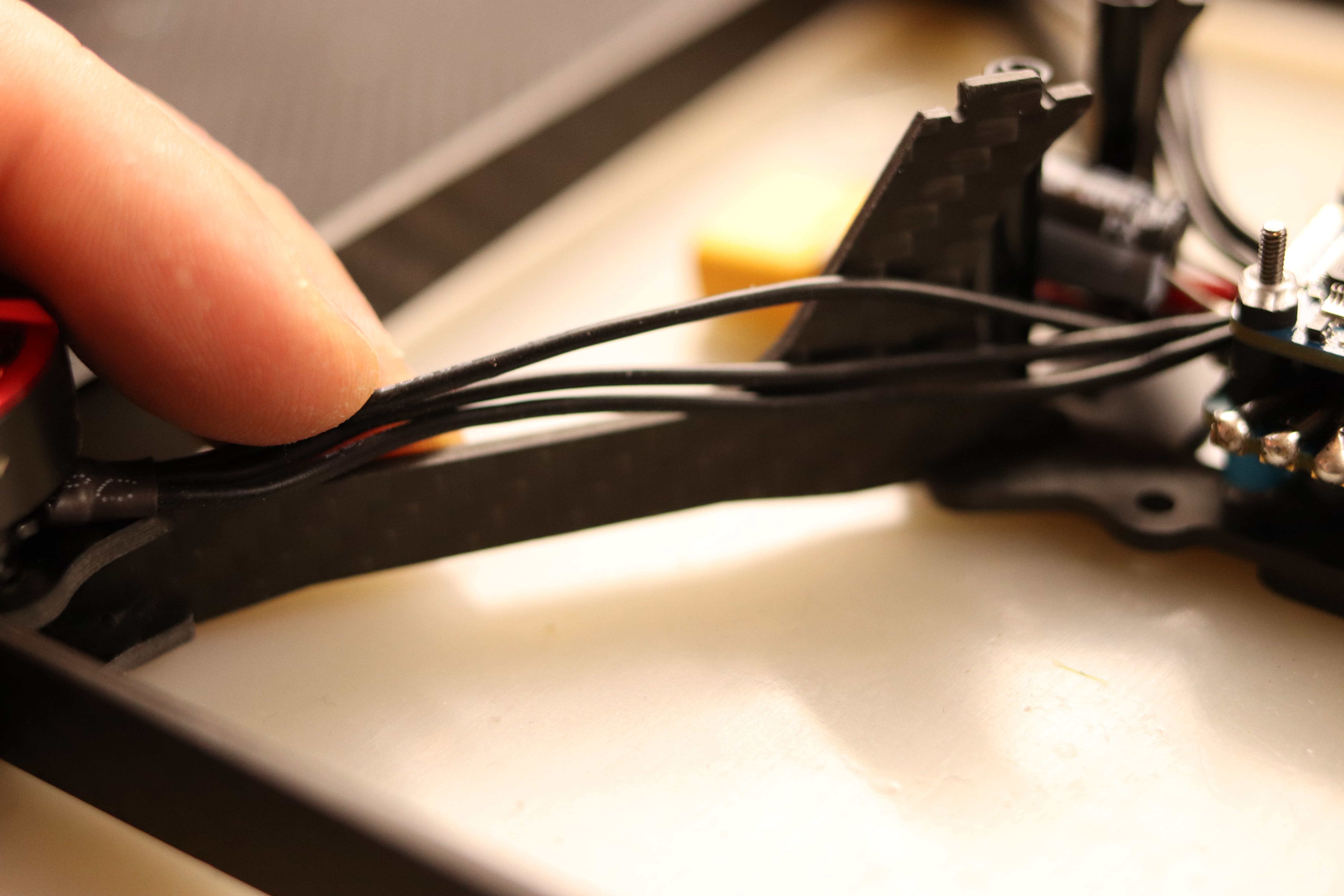
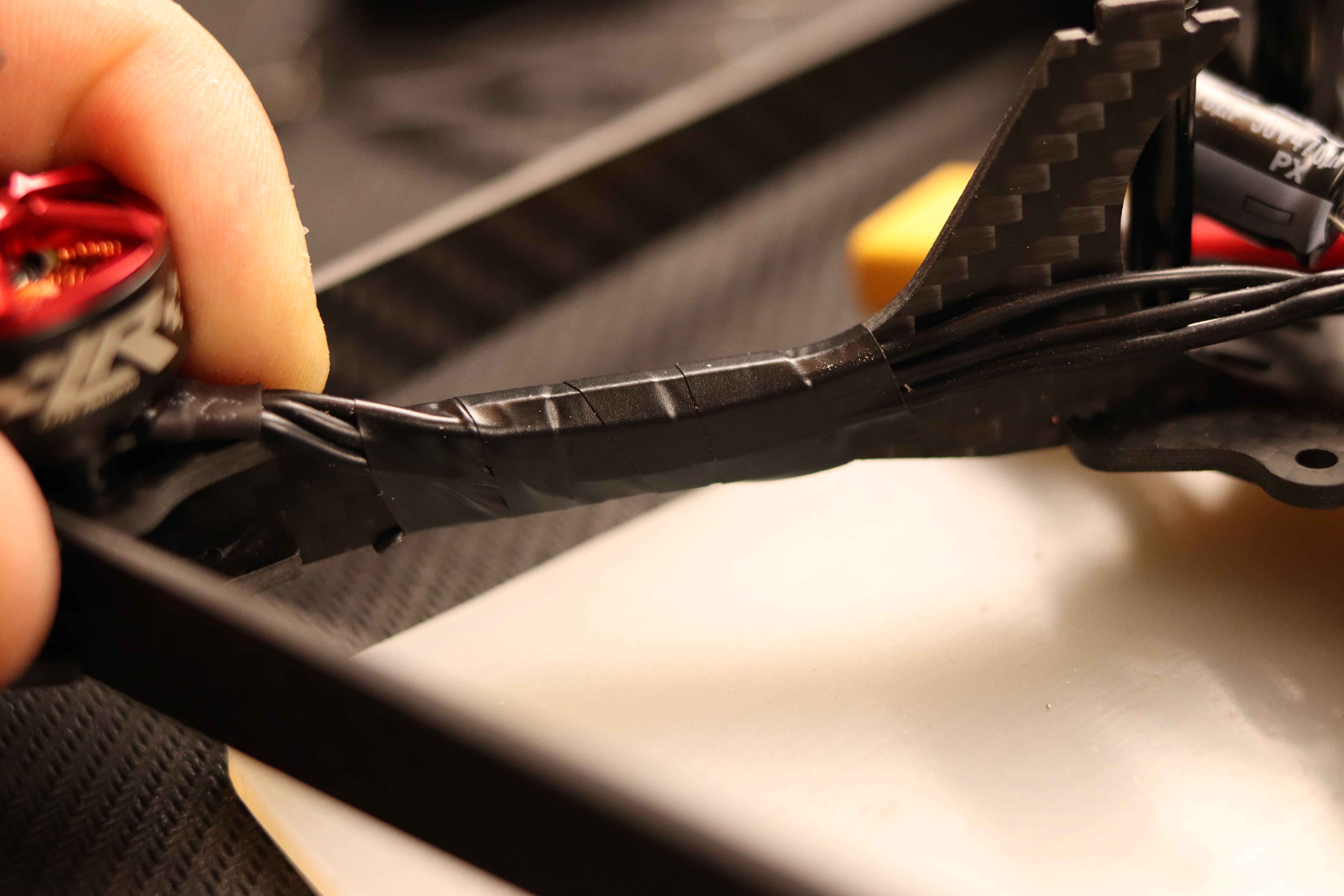
4. Uchycení kabelů od motorů
Vzhledem k trajektorii konců vrtulí je dobré kabely motorů připevnit k ramenům. Já k tomuto účelu používám elektrikářskou pásku.
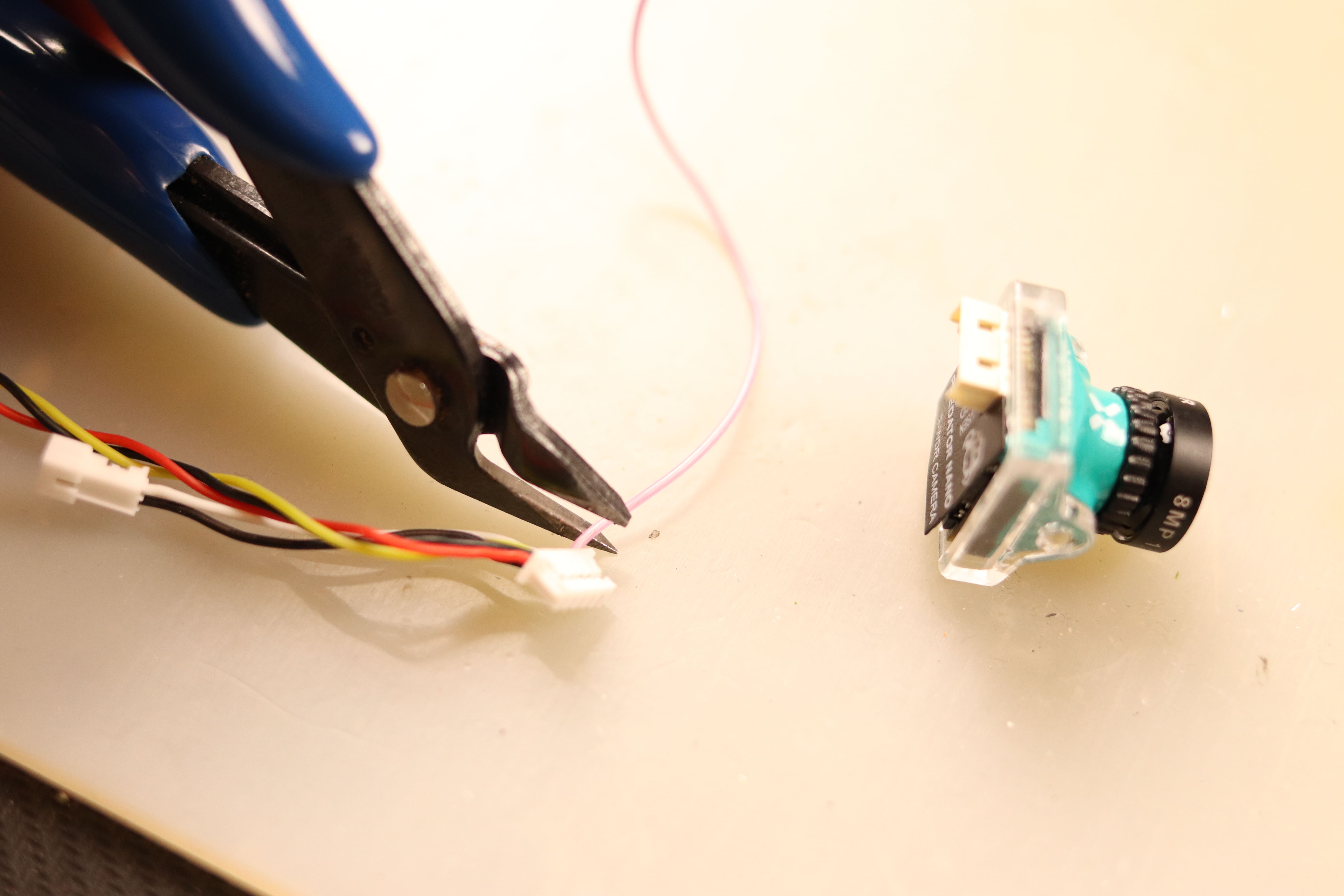
5. FPV systém
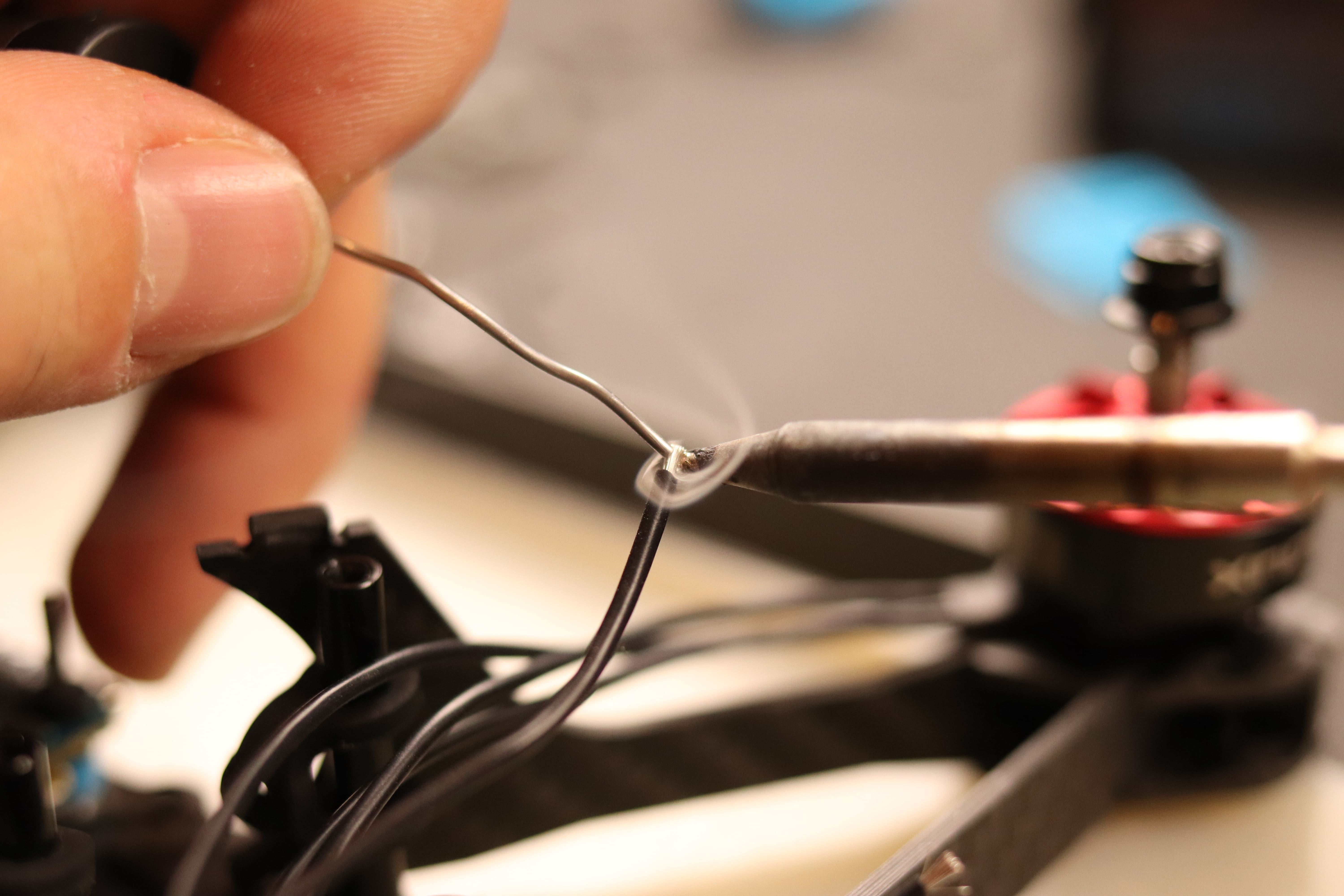
V dalším kroku se budeme zabývat systémem na přenos obrazu. Ve všech svých závodních koptérách používám Foxeer predator nano v4. Zejména kvůli nízké latenci, která je pro racing velmi důležitá, nízké váze a skvělému obrazu. Z přiloženého 5pin kabelu odstřihávám růžový, neboť nepoužívám senzor napětí v kameře. Dále si naměříme potřebnou vzdálenost mezi pozdějším umístěním kamery a FC. Zajímají nás pady +5v, GND a Vin. Opět stejná procedura s pocínováním padů a odbužírkovaných konců kabelů a jejich následné spojení.
V dalším kroku budu přidávat FPV VTx (video vysílač) a zároveň Crossfire přijímač - přijímač je individuální záležitost podle použitého rádia. Se správnou volbou přijímače Vám rádi pomůžeme. Součástí jak VTx tak CRSF přijímače jsou kabely.

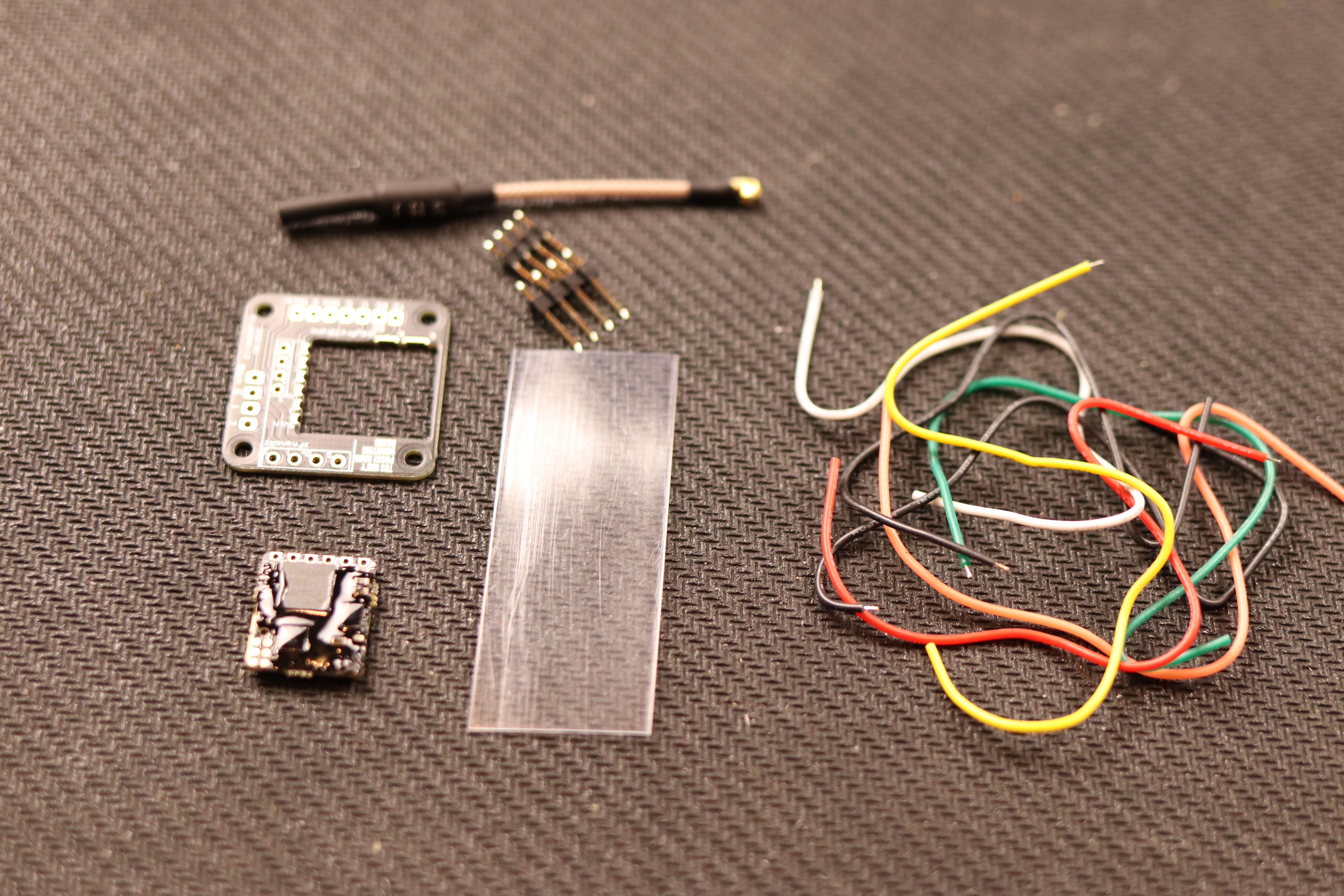
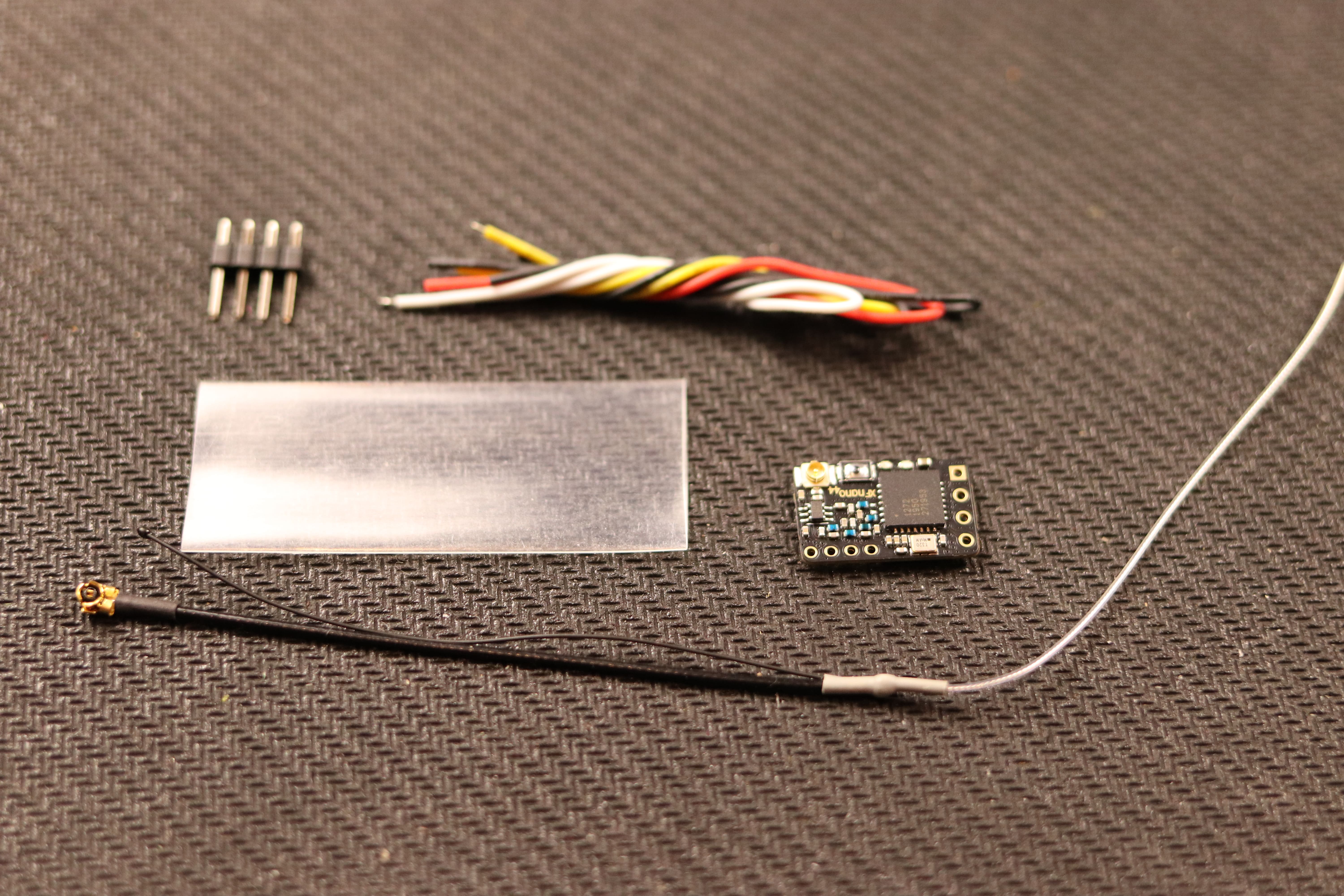
Opět konce odbužírkujeme, pocínujeme a spojíme podle tohoto schéma. Dodržení barev kabelů není důležité, ale napomáhá pozdější snazší orientaci.
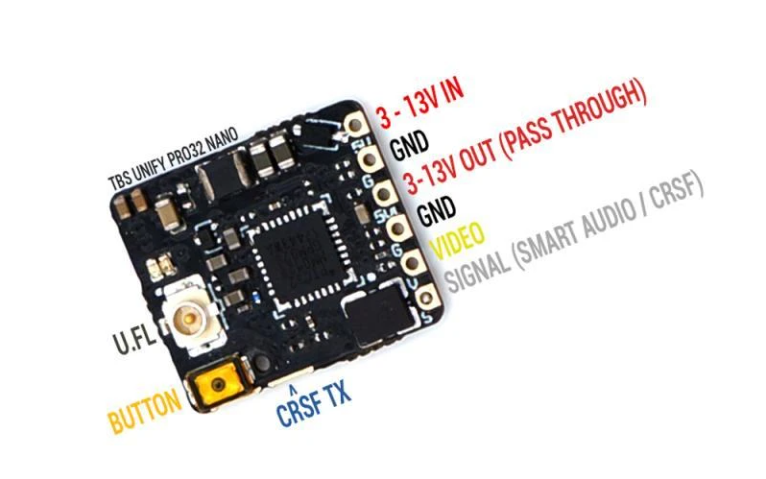
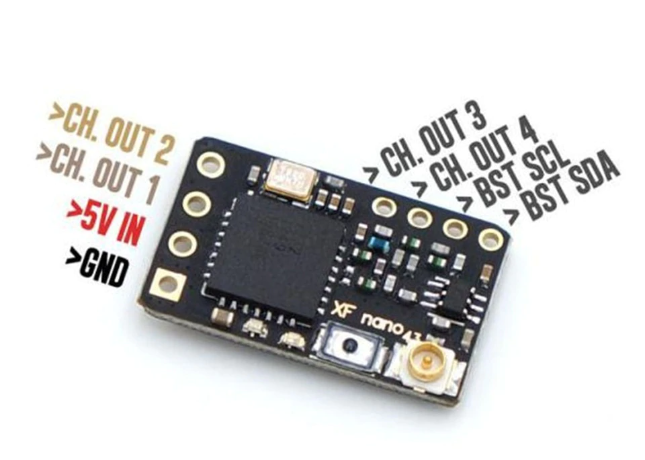
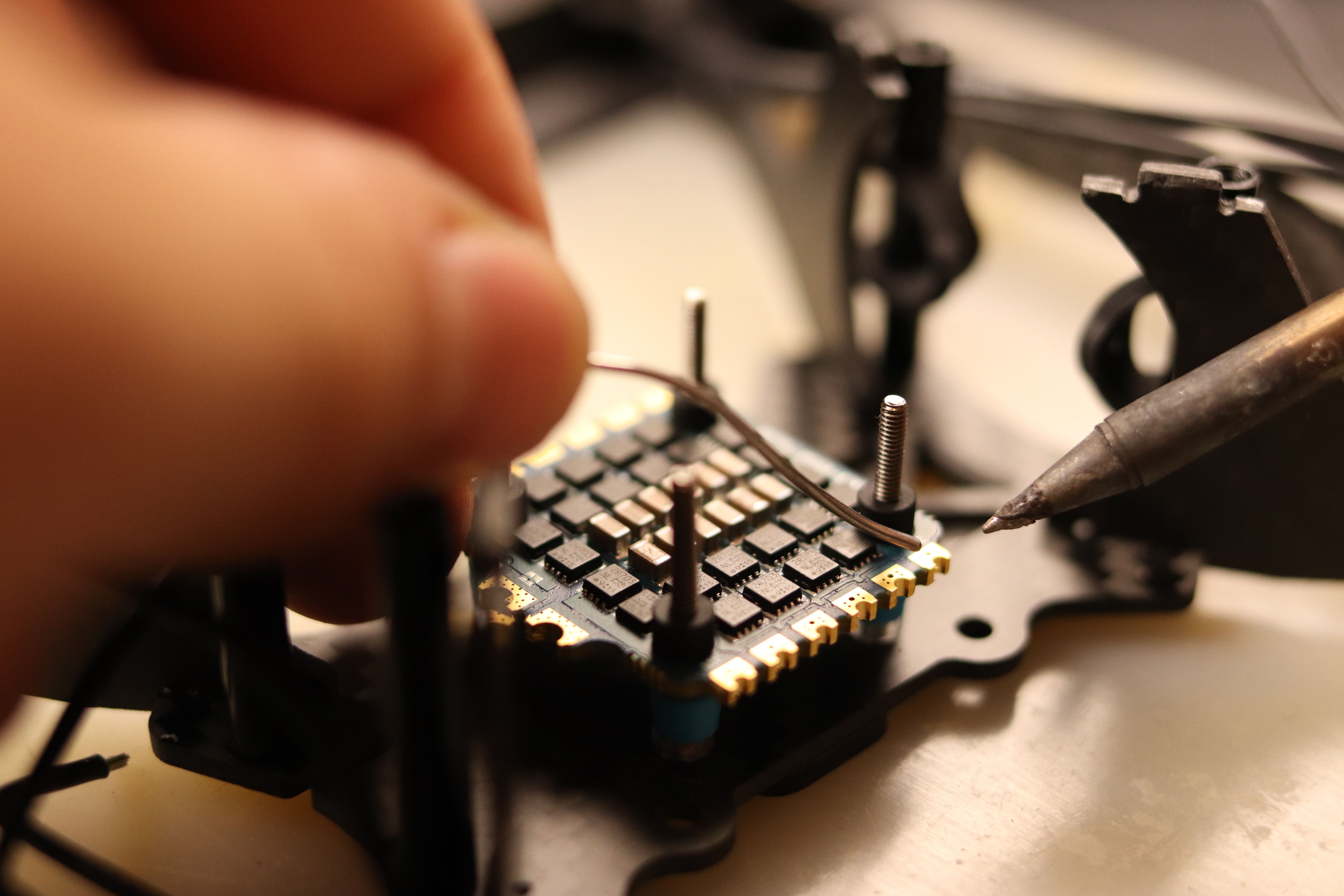
Na VTx tedy budeme potřebovat červený kabel na 3-13V, černý na GND, žlutý na Video a pokud chceme používat smartAudio, tak bílý na Signal (já používám LUA scripty k nastavování VTx přes rádio, proto spojuji SIGNAL z VTx spolu s CH. OUT 4 na CRSF - bílý kabel). Na CRSF pak černý na GND, červený na 5V, a bílý + žlutý na CH. OUT 1 a 2.
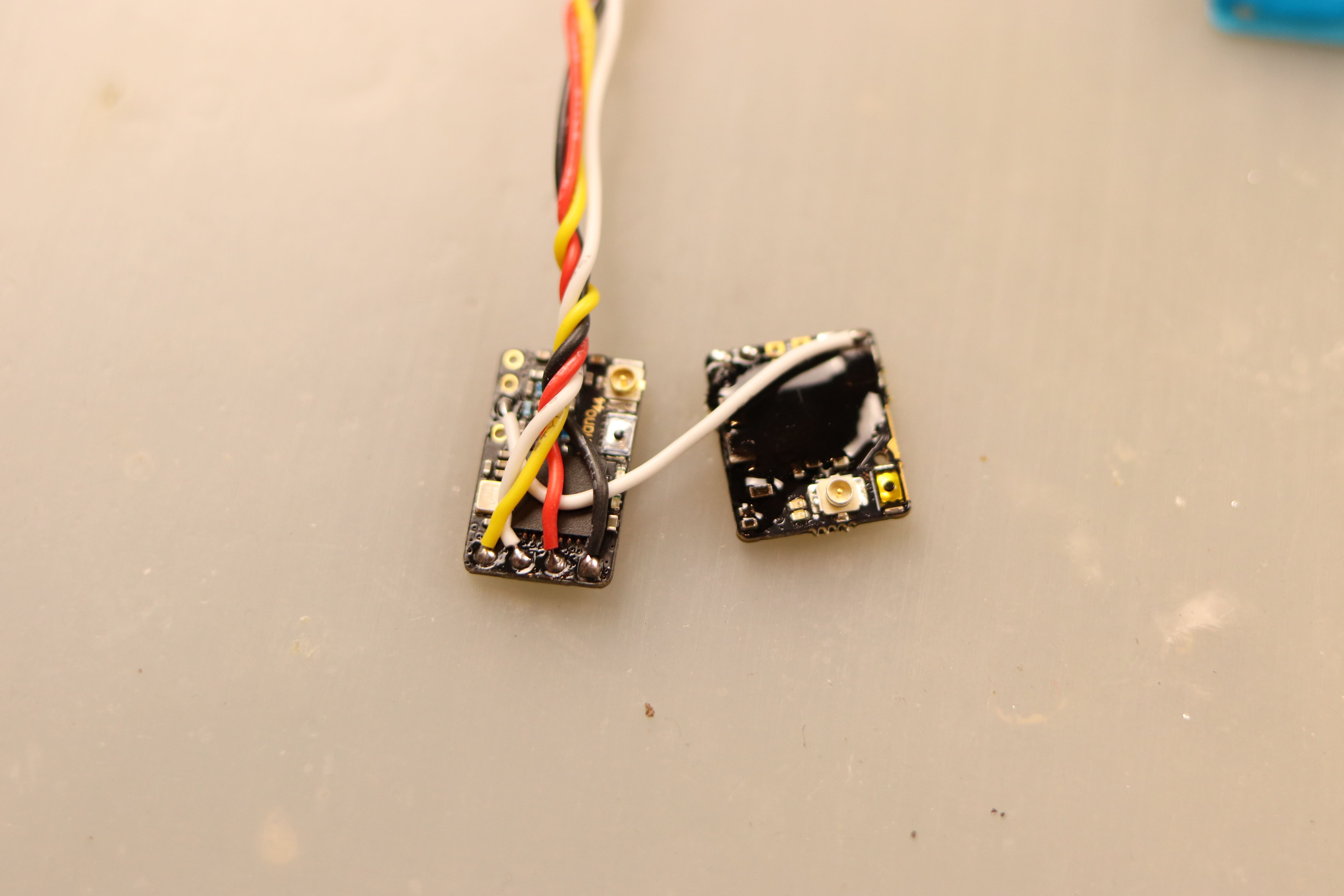
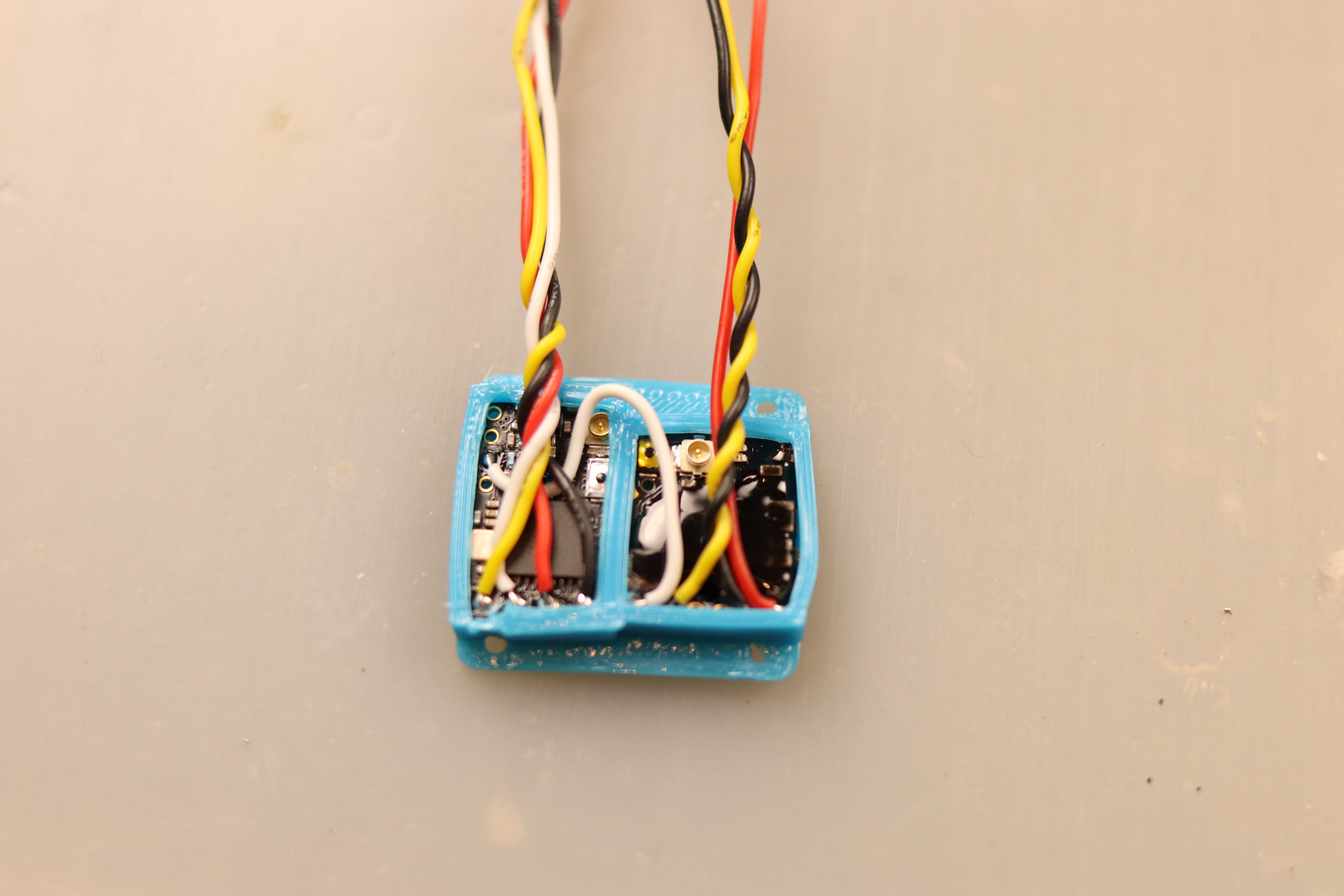
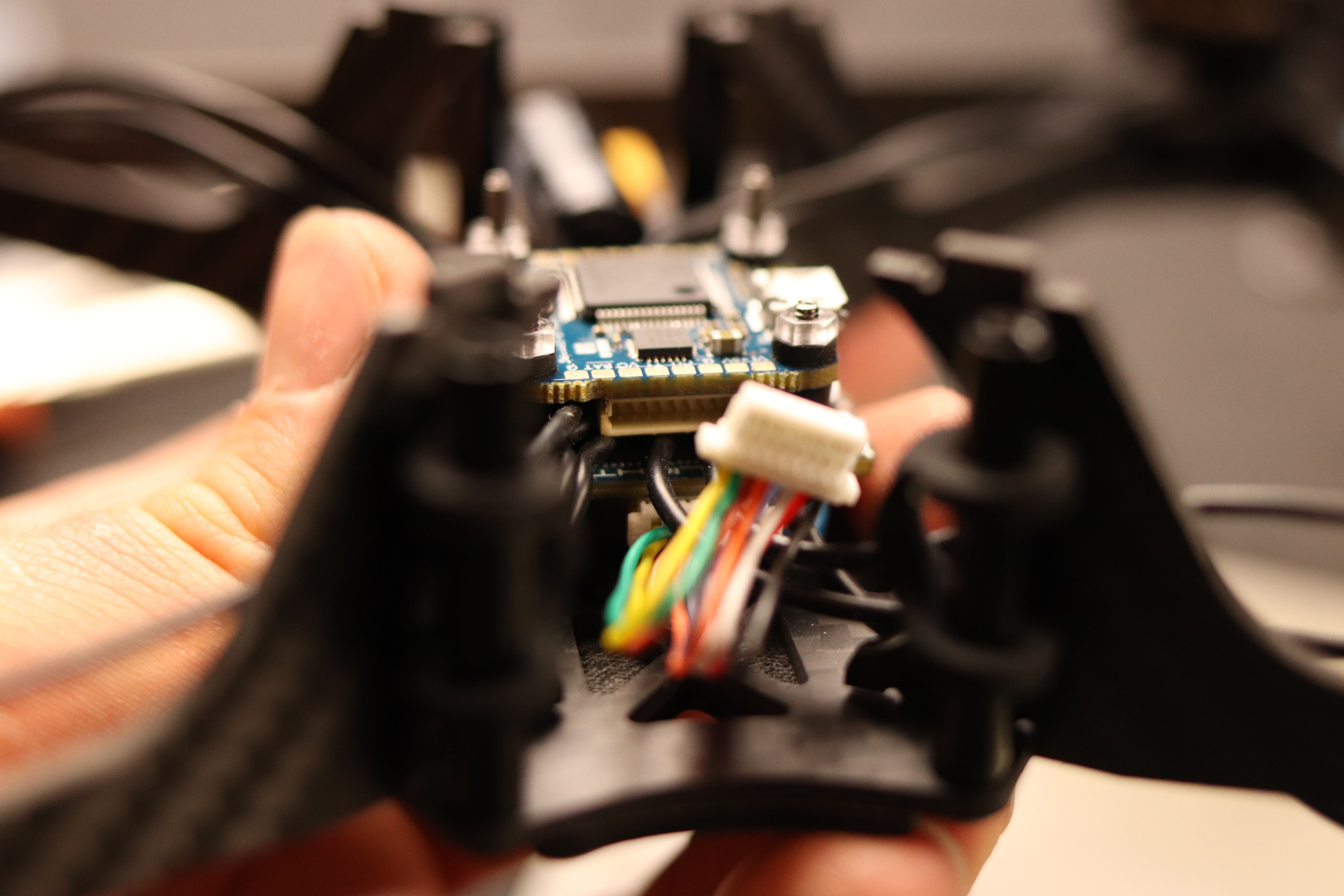
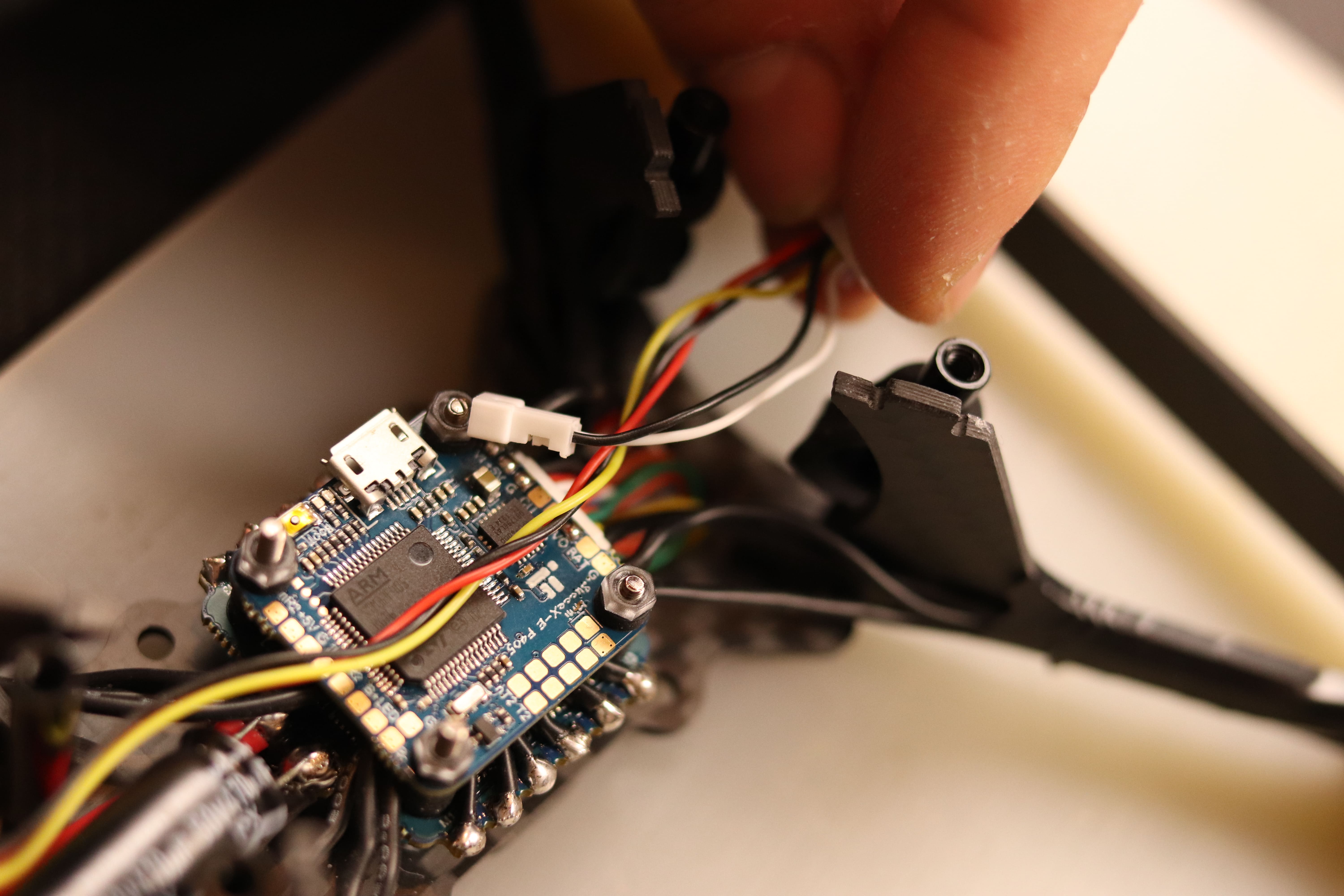
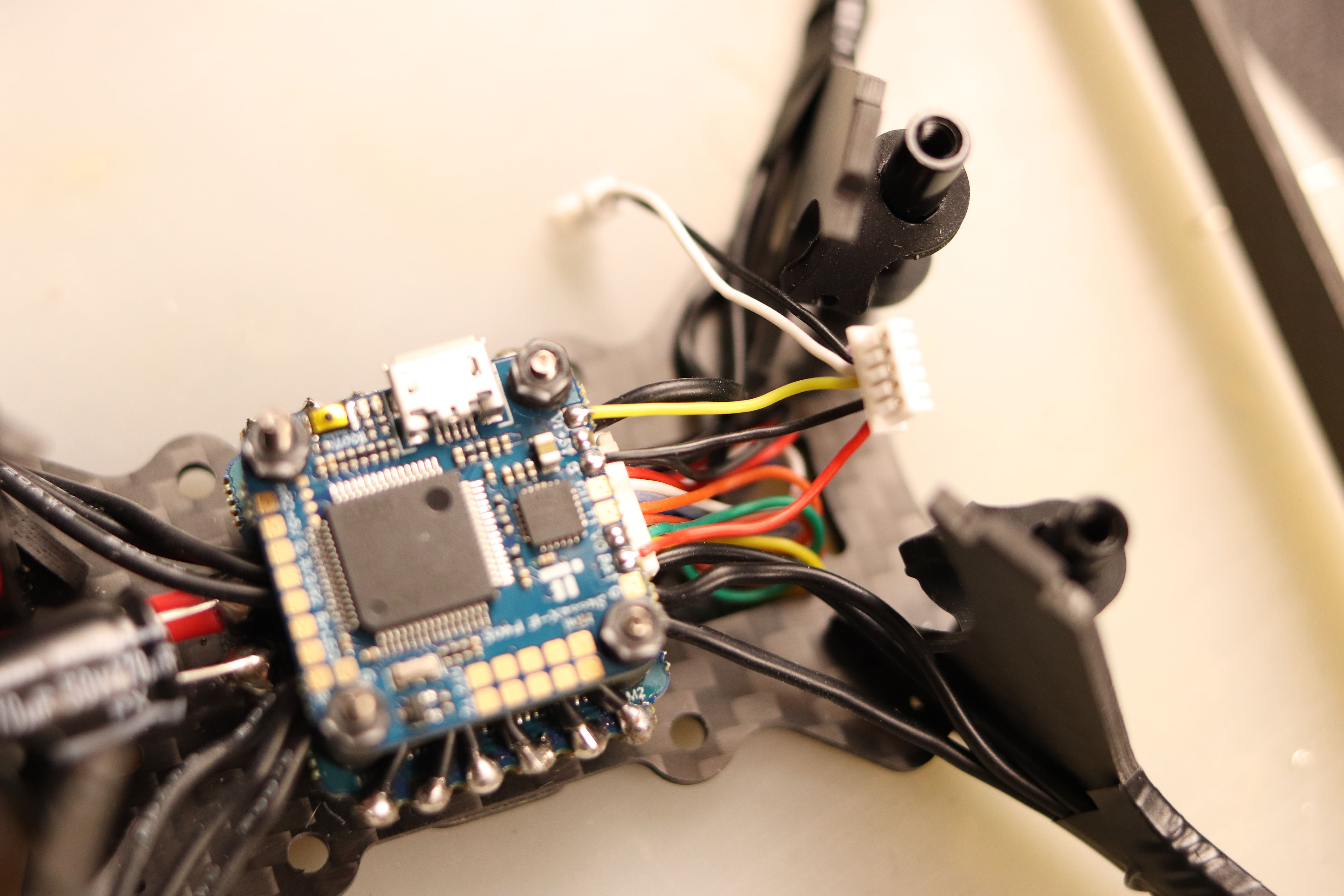
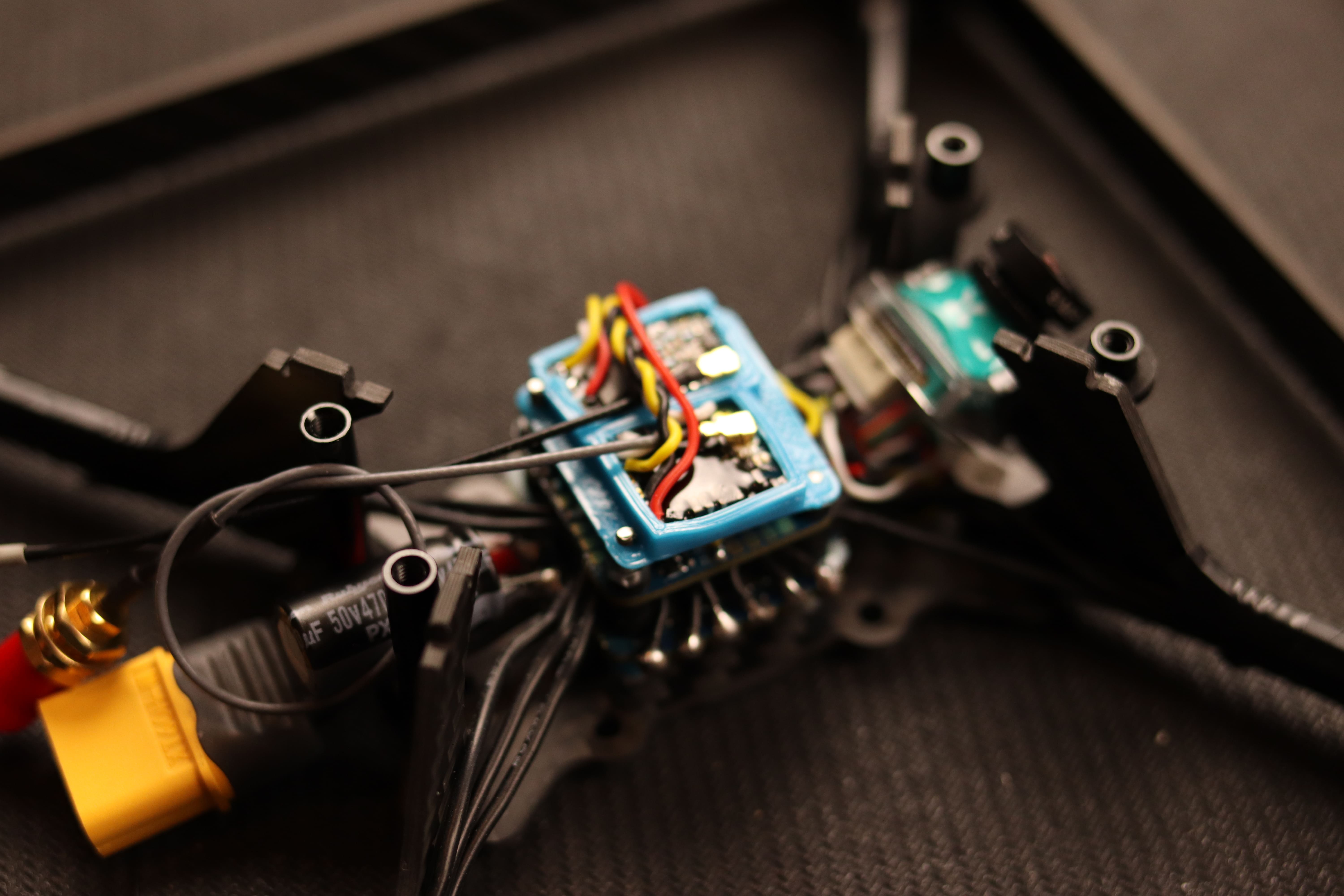
Takto připravený přijímač a vysílač umisťuji do 3d printu (rádi Vám tento print spolu s objednávkou zašleme). FC je popsané, pro VTx pocínujeme 5V (napájení), G (zem) a VO (Video výstup). FC s VTx pájením spojíme (černý - G, červený - 5V, žlutý - VO). U crossfire pokračujeme obdobně (černý - G, červený - 5V, bílý R2, žlutý - T2).

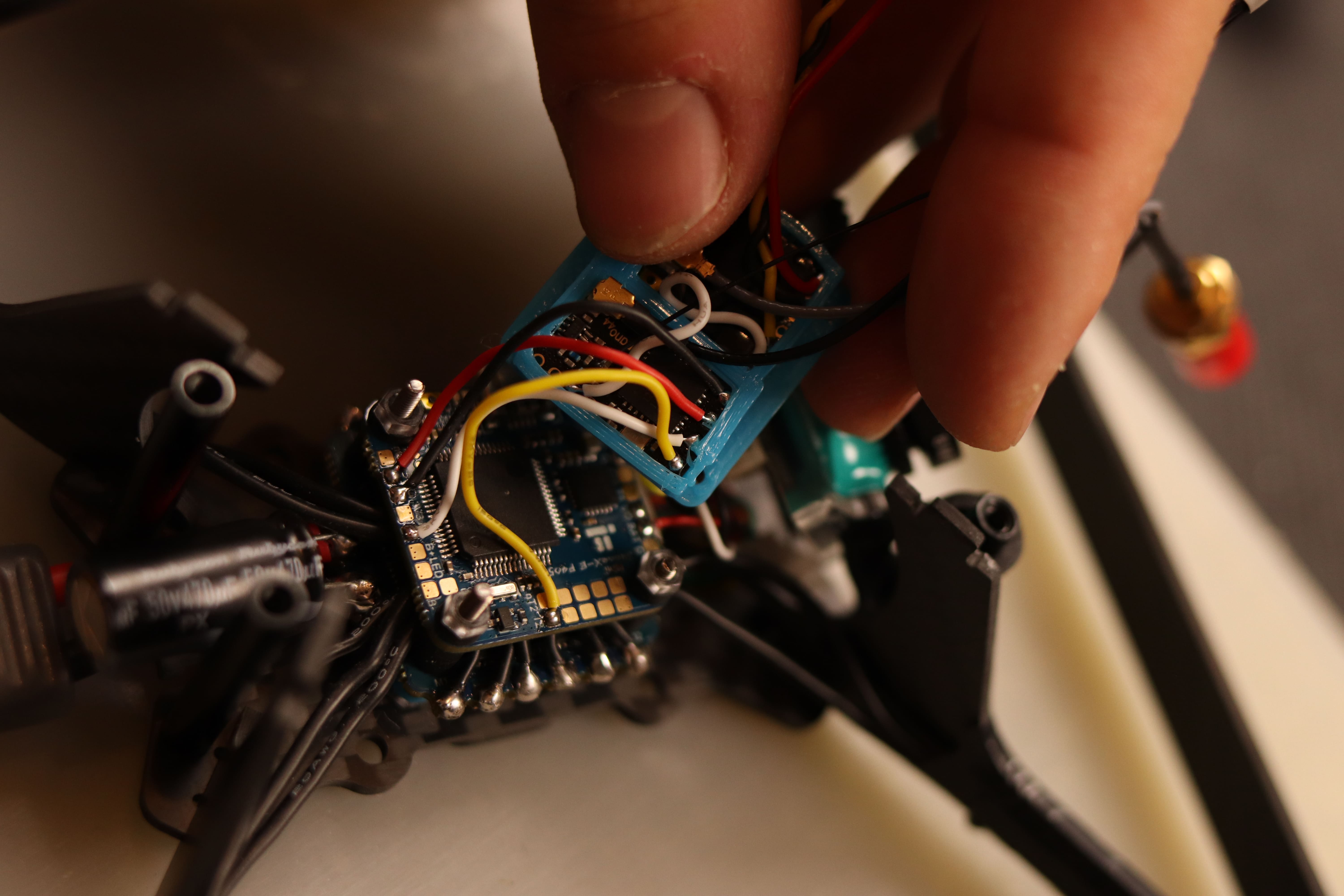
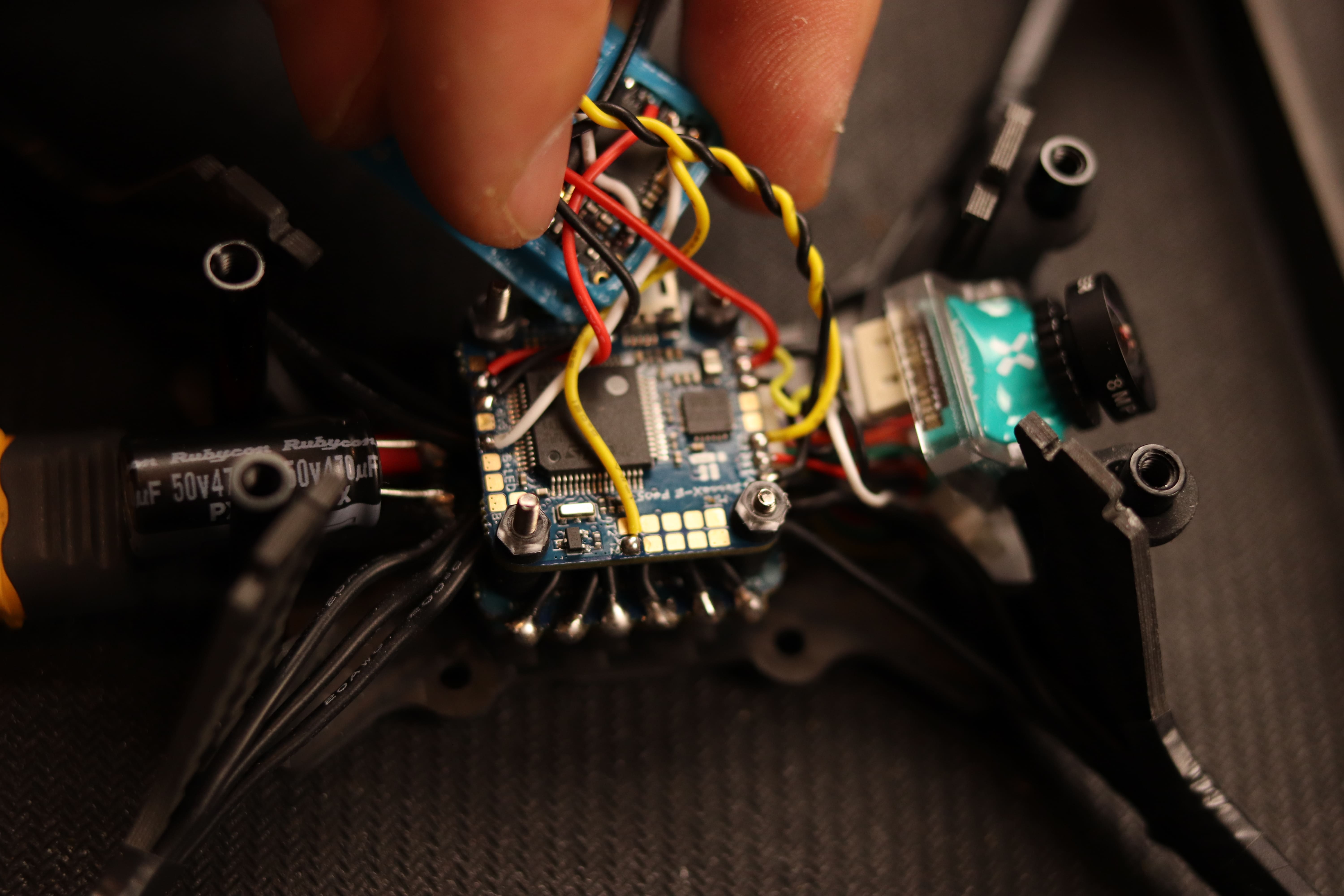
V tuto chvíli máme dopájeno. Na u.fl konektoru CRSF zacvakneme CRSF anténu a na VTx u.fl nacvakneme Ipex to SMA pigtail. Nyní zbývá jen vše ,,učesat". Dát dokupy tak, aby nikde nic nekoukalo.
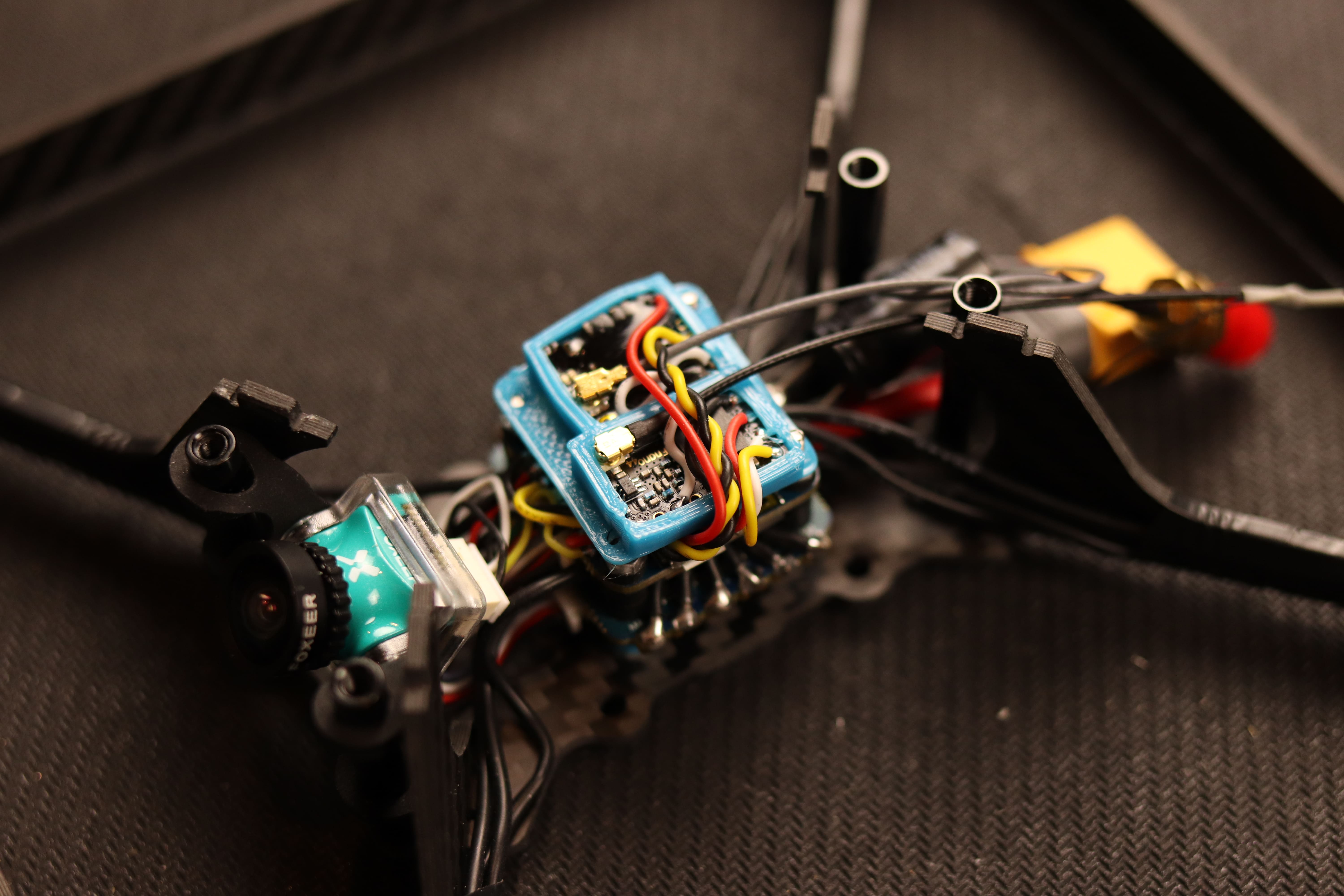
Pro umístění antény opět používám 3d print, který navlékám na zadní sloupky a skrz něj prostrkuji SMA koncovku. Anténu pak jednoduše šroubuji na pigtail.


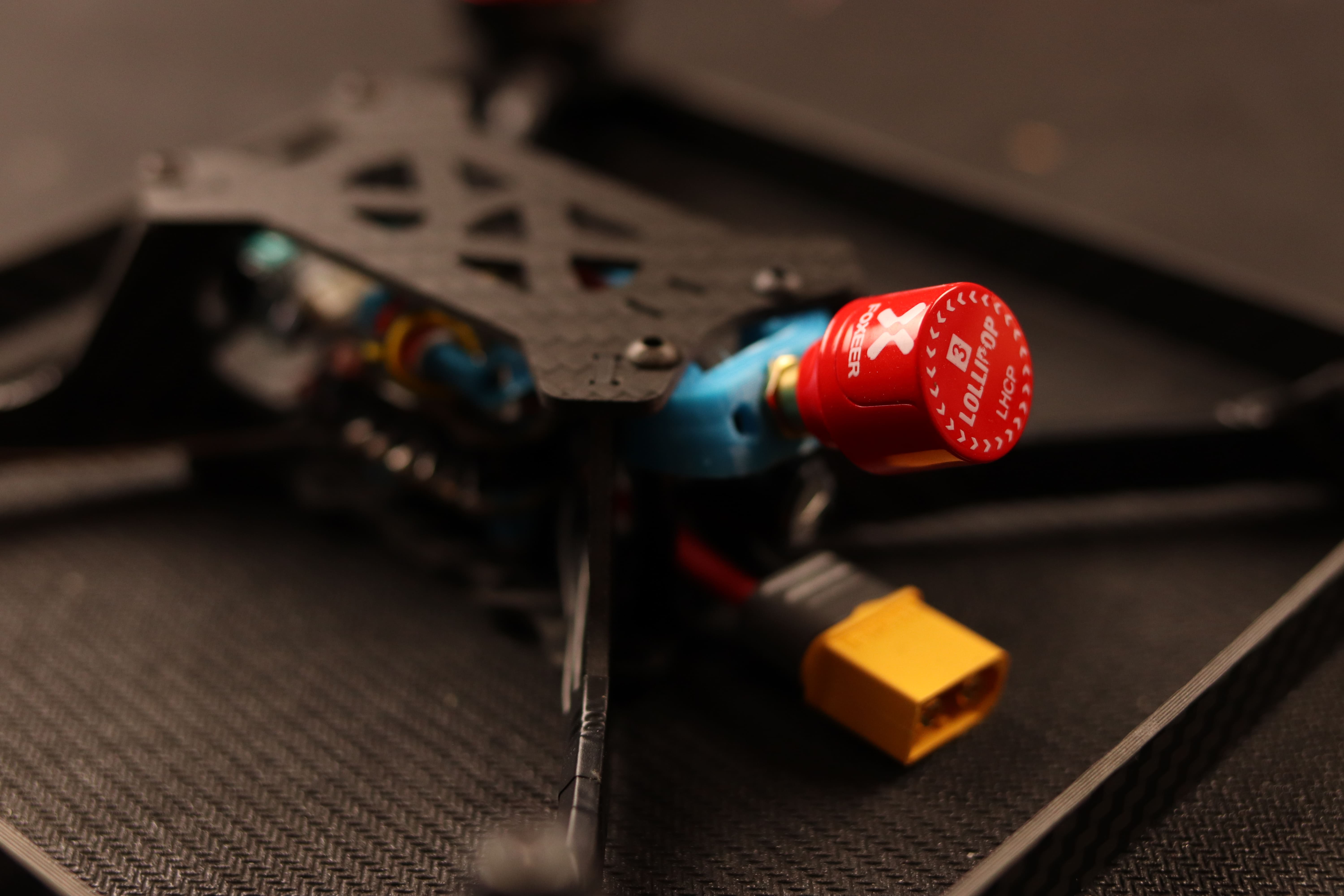
V tuto chvíli je race koptéra dostavěná a připravena na FPV závody dronů. V mém případě váží parádních 257 gramů.